Flexible three-finger clamp holder having touch sensing function
A tactile perception and tactile sensor technology, applied in chucks, manufacturing tools, manipulators, etc., can solve the problem that the robot end effector cannot meet the grasping requirements and the structure is simple at the same time, and achieve the effect of simple structure and reliable clamping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] In order to make the object, technical solution and advantages of the present invention more clear and definite, the present invention will be further described in detail below with reference to the accompanying drawings and examples.
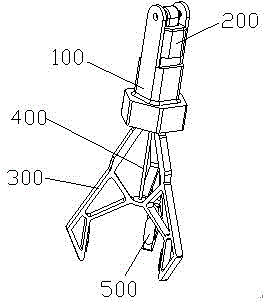
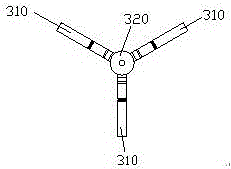
[0030] Such as Figure 1-2 As shown, a compliant three-finger gripper with tactile sensing function, including:
[0031] Motor bracket 100;
[0032] The motor 200 installed on the motor bracket 100;
[0033] A flexible gripper 300 for holding objects;
[0034] A fixed rod 400 connecting the flexible gripper 300 and the motor spindle;
[0035] A tactile sensor 500 for obtaining in real time the distribution of the contact force between the flexible gripper 300 and the gripped object;
[0036] A control system for controlling the motor 200 to drive the flexible gripper to grip the object according to the distribution of the contact force between the flexible gripper 300 and the gripped object fed back by the tactile sensor 500;
[003...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com