Maneuvering target detection and tracking method based on dp-tbd
A DP-TBD, maneuvering target technology, applied in radio wave measurement systems, instruments, etc., can solve the problems of ineffective detection and tracking of acceleration, turning, U-turn targets, increased influence, overlapping search ranges, etc. The state search efficiency, estimation speed is basically correct, and the effect of effective detection and tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034]The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
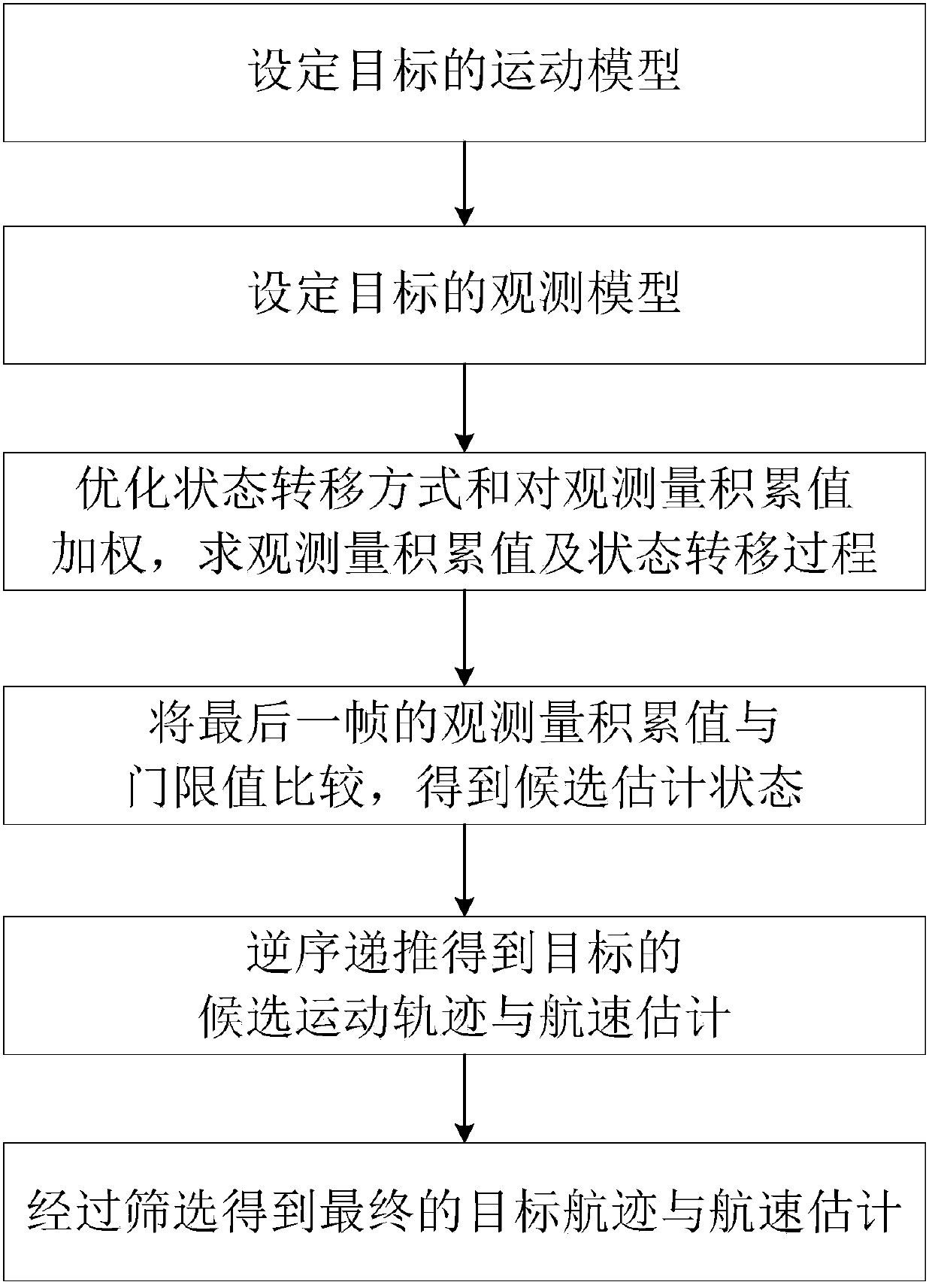
[0035] refer to figure 1 , the present invention is based on the maneuvering target detection and tracking method of DP-TBD, comprises the following steps:
[0036] Step 1, set the target motion model.
[0037] Assuming that the target moves in the X-Y plane, the state equation is: in is the target motion state, including the position and velocity of the target at time k, F is the state transition matrix of the target motion trend, W k is the disturbance matrix of the observation error and quantization error during the simulation motion.
[0038] Step 2, setting the observation model of the target.
[0039] (2a) Consider an observation range containing N resolution units, the resolution unit size is set to Δ, the speed resolution unit is set to Δv, and the observation frame interval is set to T, so T·Δv=Δ;
[0040] (2b) with X ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com