Terminal sliding mode controller based on fractional calculus, and control method
A fractional-order calculus, terminal sliding mode technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as disturbance insensitivity, achieve small steady-state error, strong robustness, simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments, but the present invention is not limited to these embodiments.
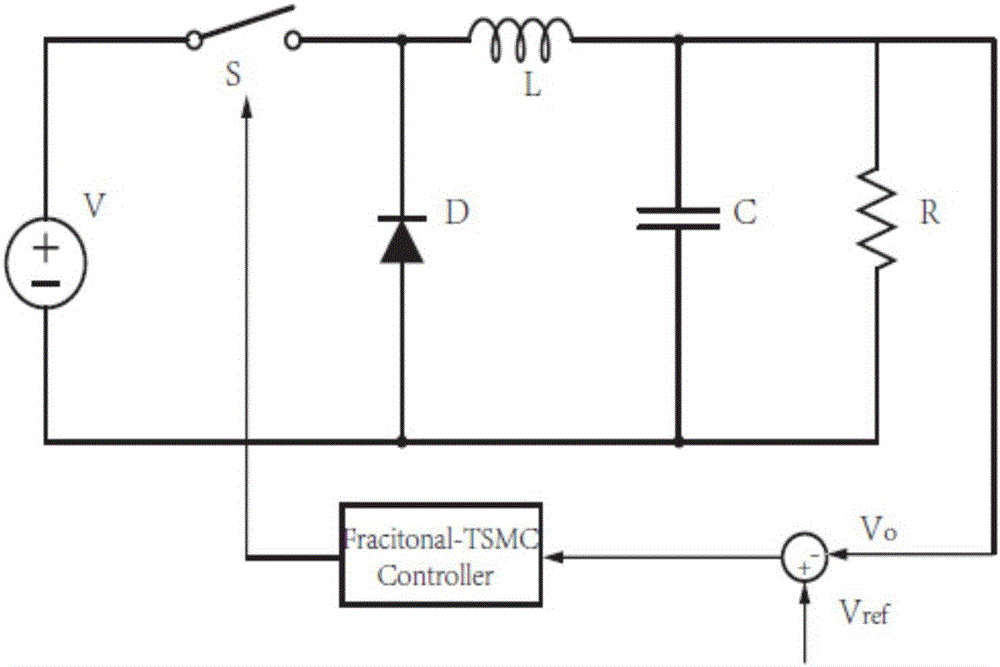
[0034] The idea of the terminal sliding mode controller based on fractional calculus of the present invention is to introduce fractional calculus into integer-order terminal sliding mode control. This method has the characteristics of fast convergence speed and high accuracy.
[0035] The controller as figure 1 As shown, its design method is:
[0036] Step 1: Choose Riemman-Liouville (R-L) to define fractional calculus, and its α-order fractional differential operator is defined as:
[0037] D t - α 0 f ( t ) = 1 Γ ( α ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com