Performance limited flexible manipulator control method based on determining learning theory
A technology that determines the learning theory and flexible manipulators. It is applied in the direction of manipulators, program-controlled manipulators, and manufacturing tools. It can solve the problems of time-consuming redundancy and difficult access to neural networks.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
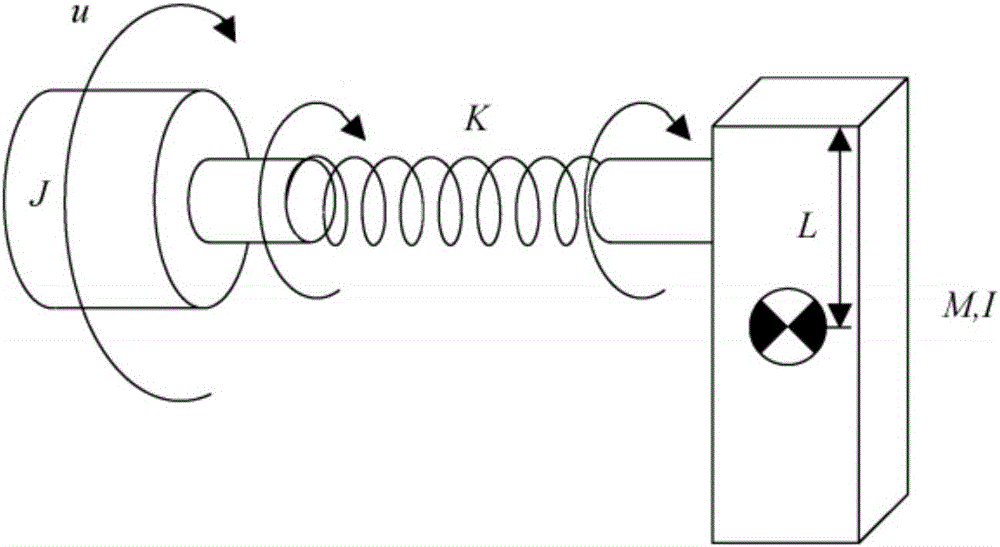
[0048] This embodiment mainly studies the trajectory tracking control of the flexible manipulator in the case of limited tracking performance. figure 1 A schematic diagram of the flexible robotic arm system.
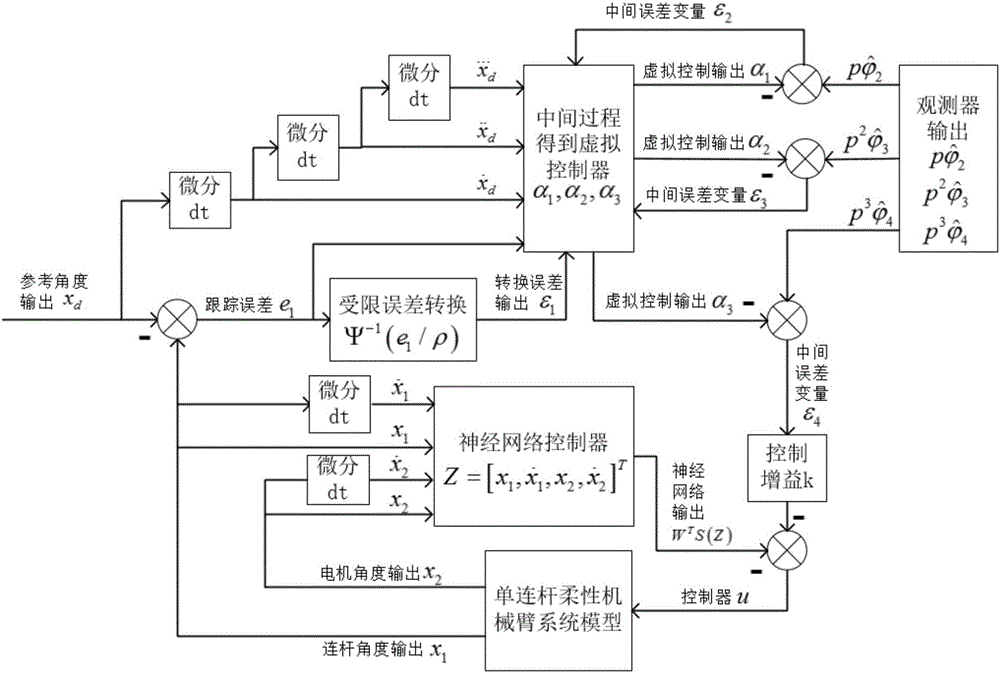
[0049] The overall control block diagram of the performance-limited flexible manipulator control method based on deterministic learning theory is as follows: figure 2 As shown, its detailed implementation process includes:
[0050] Step (1): Establish a dynamic model of the flexible manipulator.
[0051] According to the following flexible manipulator system model:
[0052] I x ·· 1 + M g L sin x 1 + K ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com