Double-input and multiple-output synergy device based on differential planetary gear
A planetary gear and planetary gear transmission technology, applied in the field of dual-input multi-output synergistic devices, can solve the problem that the synergistic prosthetic hand drive mechanism cannot integrate the palm and the like
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
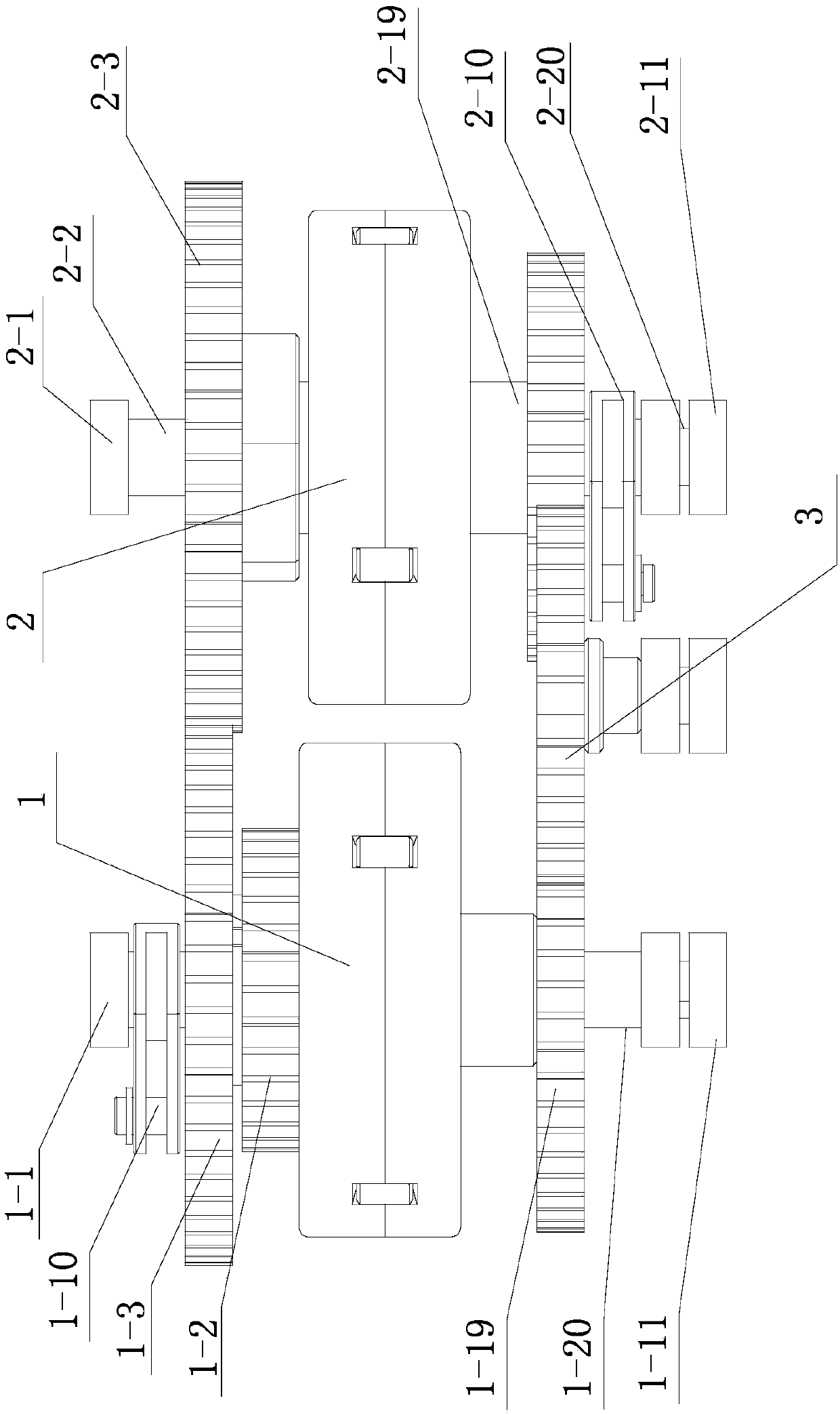
[0013] Specific implementation mode one: combine Figure 1-Figure 4 Describe this embodiment, the dual-input multiple-output synergy device based on differential planetary gears in this embodiment includes a first differential planetary gear mechanism 1, a second differential planetary gear mechanism 2 and a differential planetary gear transmission gear assembly 3. The first differential planetary gear mechanism 1 includes the first output shaft end bearing 1-1, the first carrier gear 1-3, the first carrier fixed gear 1-2, the first output shaft 1-4, the first Planetary gear assembly, first output shaft connecting rod 1-10, first input shaft gear 1-19, first input shaft 1-20, two first input shaft end sliding bearings 1-11, two first output shafts The middle bearing 1-13 and two first input shaft middle bearings 1-18, the second differential planetary gear mechanism 2 includes the second input shaft end bearing 2-1, the second input shaft sleeve 2-2, the second input shaft Sh...
specific Embodiment approach 2
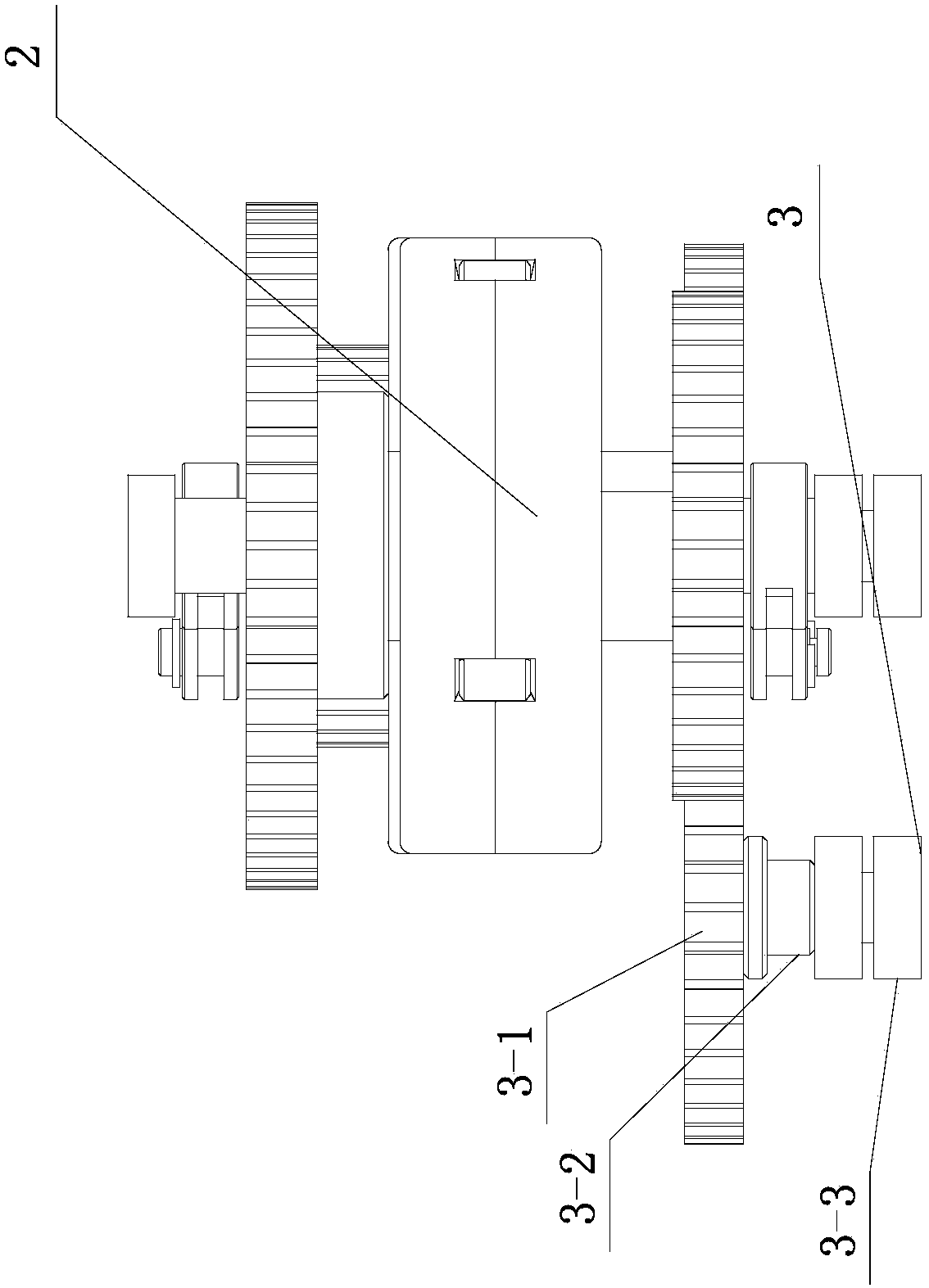
[0014] Specific implementation mode two: combination Figure 1-Figure 4 Describe this embodiment, the dual-input multi-output synergy device based on the differential planetary gear described in this embodiment, the differential planetary gear transmission gear assembly 3 includes a differential planetary gear transmission gear 3-1, a differential planetary gear transmission shaft 3-2 and the differential planetary gear transmission bearing 3-3, one end of the differential planetary gear transmission shaft 3-2 is installed on the differential planetary gear transmission bearing 3-3, and the other end of the differential planetary gear transmission shaft 3-2 It is installed on the differential planetary gear transmission gear 3-1, and the differential planetary gear transmission gear 3-1 meshes with the first input shaft gear 1-19 and the second carrier gear 2-19 respectively. Others are the same as in the first embodiment.
specific Embodiment approach 3
[0015] Specific implementation mode three: combination Figure 1-Figure 4Describe this embodiment, the dual-input multiple-output synergy device based on differential planetary gears in this embodiment, the first planetary gear assembly includes a first planetary carrier 1-9, a first sun gear 1-14, a first gear Carrier 1-15, first ring gear 1-16, first ring gear carrier 1-17 and three first planetary gear assemblies, the second planetary gear assembly includes second planetary carrier 2-9, second sun gear 2 -14, the second gear carrier 2-15, the second ring gear 2-16, the second ring gear carrier 2-17 and three second planetary gear assemblies, the first gear carrier 1-15 and the first ring gear carrier 1-17 are relatively installed on both ends of the first ring gear 1-16, the first sun gear 1-14 is set on the output end of the first input shaft 1-20, and the three first planetary gear assemblies are arranged along the circumferential direction Evenly distributed on the oute...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com