


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Acceleration measurement method and device based on particle image velocimetry technology
A particle image velocity measurement and acceleration measurement technology, which is applied in the direction of velocity/acceleration/shock measurement, measuring device, and acceleration measurement, can solve the problems of error sensitivity, particle matching, and particle missing, so as to improve calculation accuracy, maintain physical characteristics, The effect of increasing the amount of information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
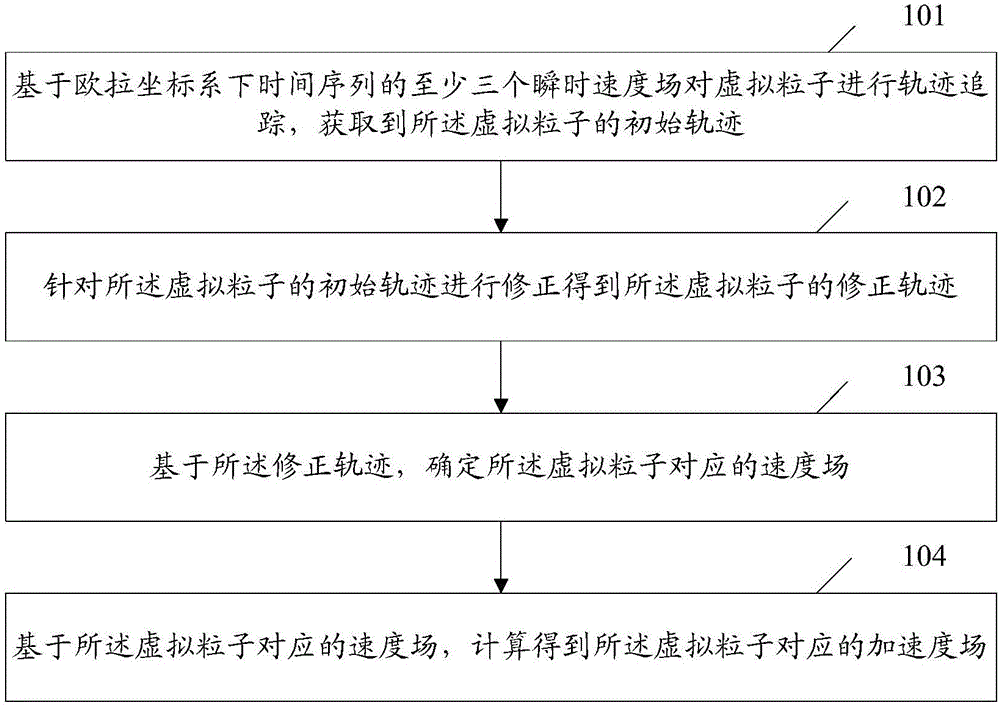
[0027] An embodiment of the present invention provides an acceleration measurement method based on particle image velocimetry technology, such as figure 1 shown, including:
[0028] Step 101: Track the trajectory of the virtual particle based on at least three instantaneous velocity fields in the time series in the Euler coordinate system, and obtain the initial trajectory of the virtual particle;
[0029] Step 102: Correcting the initial trajectory of the virtual particle to obtain the corrected trajectory of the virtual particle; wherein, the corrected trajectory at least includes each coordinate of the virtual particle corresponding to each moment in the time sequence;
[0030] Step 103: Determine the velocity field corresponding to the virtual particle based on the corrected trajectory; wherein, the velocity field includes velocity information corresponding to the virtual particle at each coordinate;
[0031] Step 104: Based on the velocity field corresponding to the virt...
Embodiment 2
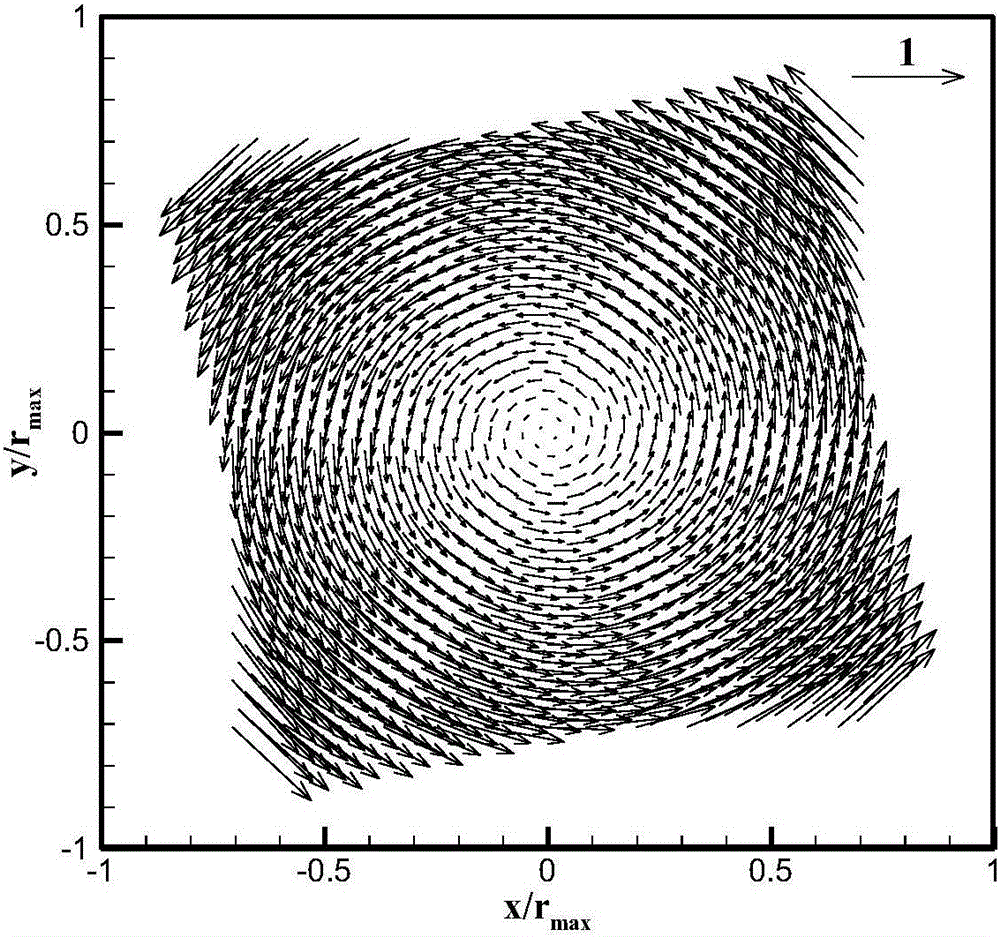
[0085] The method of the present invention will be described below in combination with specific application scenarios. In this embodiment, an artificially generated two-dimensional rigid body rotating flow field is used to simulate the velocity field obtained by the PIV technology as an example for illustration. The number of grid points of the two-dimensional rigid body rotating flow field is 101×101, the time interval between two adjacent frames of velocity fields is Δt=0.01s, and the rotation angular velocity is ω, then the rigid body rotation angle between every two frames of velocity fields is Δθ=ωΔt, Δθ=3° in this application scenario. The number of Euler velocity fields is selected as 5, denoted as V e ={V e (t -2 ), V e (t -1 ), V e (t 0 ), V e (t 1 ), V e (t 2 )}, where t 0 Time is chosen as 0, then t i =i×0.01s, -2≤i≤2. In order to simulate the error produced in PIV velocity measurement, Gaussian white noise whose magnitude is 2% of the average velocity...
Embodiment 3
[0095] The embodiment of the present invention also provides an acceleration measurement device based on particle image velocimetry technology, such as Image 6 As shown, the device can be set inside the computer, including:
[0096] The initial trajectory tracking calculation module 601 is used to track the trajectory of the virtual particle based on at least three instantaneous velocity fields of time series in the Euler coordinate system, and obtain the initial trajectory of the virtual particle;
[0097] The corrected trajectory calculation module 602 is configured to correct the initial trajectory of the virtual particle to obtain the corrected trajectory of the virtual particle; wherein, the corrected trajectory at least includes the virtual particles corresponding to each moment in the time series each coordinate; and based on the corrected trajectory, determine a velocity field corresponding to the virtual particle; wherein, the velocity field includes velocity informa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com