Fourier-Mellin transform-based image geometric matching method
A technology of Fourier transform and matching method, which is applied in the field of image geometric matching based on Fourier Merlin transform, can solve the problems of increasing matching time and improving matching accuracy not much, and achieves improved accuracy, short matching time, and improved matching. The effect of matching accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
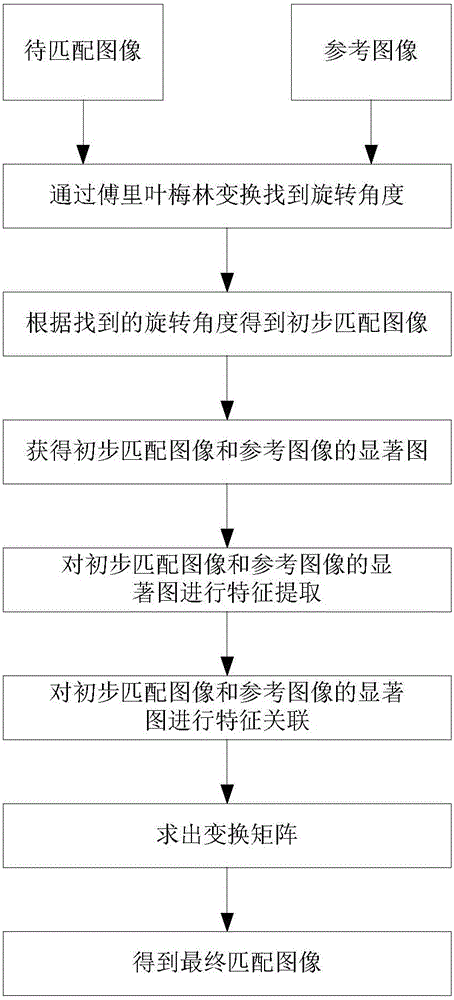
[0043] The present invention proposes a kind of image geometric matching method based on Fourier Merlin transform, see figure 1 , to match the image to be matched with the reference image, the matching steps include:
[0044] Step 1: Use Fourier Merlin Transform to find the rotation angle between the image to be matched and the reference image. First, input the image to be matched and the reference image. The reference image and the image to be matched are images of the same scene. There is a certain rotation angle difference, that is, there is a certain rotation angle difference between the image to be matched and the reference image. Both the image to be matched and the reference image are transformed into the Fourier frequency domain to obtain the spectrum of the image to be matched and the reference image, and then the spectrum of the image to be matched and the Fourier spectrum of the reference image are respectively modulo values to establish a relationship between the...
Embodiment 2
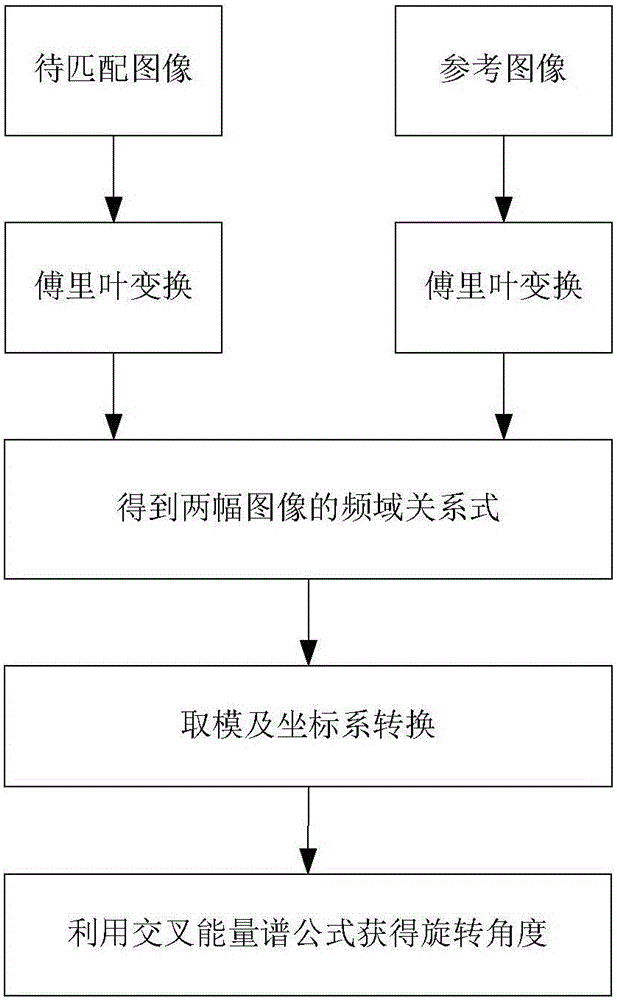
[0057] The image geometric matching method based on Fourier Mellin transform is the same as embodiment 1, see figure 2 , wherein the use of Fourier Merlin transform described in step 1 to obtain the rotation angle between the image to be matched and the reference image includes the following steps:
[0058] 1.1 Input the image to be matched and the reference image. The reference image and the image to be matched are images of the same scene. There is a certain rotation angle difference between them. The relationship can be expressed by the following formula,
[0059] f 2 (x,y)=f 1 [a(xcosθ 0 +ysinθ 0 )-Δx,a(-xcosθ 0 +ysinθ 0 )-Δy]
[0060] In the above formula, f 1 (x,y) is the reference image, f 2 (x,y) is the image to be matched, a is the scaling factor, θ 0 is the rotation angle between the image to be matched and the reference image, Δx and Δy are f 1 (x,y) and f 2 (x, y) translation on the x-axis and y-axis;
[0061] 1.2 Perform Fourier transform on both the ...
Embodiment 3
[0087] The image geometric matching method based on Fourier Merlin Transform is the same as that in Embodiment 1-2, wherein the feature points in the reference image saliency map and the image to be matched are extracted using the SURF corner point extraction algorithm described in step 3, including the following steps :
[0088] 3.1 Use the spectral residue theory to obtain the saliency maps of the reference image and the image to be matched.
[0089] 3.2 Determine the candidate feature points in the saliency map of the reference image and the saliency map of the image to be matched, calculate the value of the determinant of the Hessian matrix of each point, and calculate the determinant of the Hessian matrix of each point. The 3×3 three-dimensional area is subjected to non-maximum value suppression, that is, by comparing the values of 8 points near a certain point on this scale and 9 points on the upper and lower adjacent scales, the largest or smallest one is selected as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com