Multi-manipulator-cooperating robot palletizer
A palletizing robot and robotic arm technology, applied in the field of robotics, can solve problems such as increasing equipment operating costs, troublesome replacement of grippers, etc., and achieves the effects of strong adaptability, improved work efficiency, and accurate precision.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
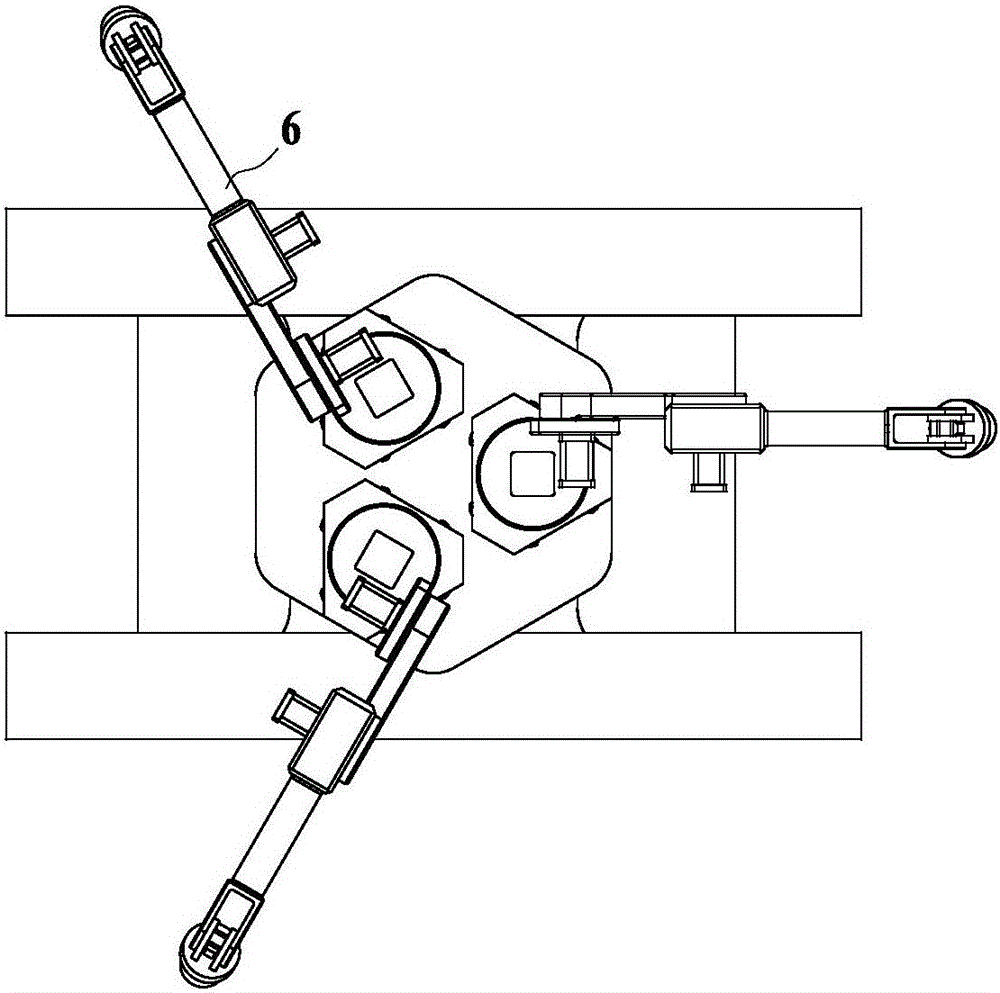
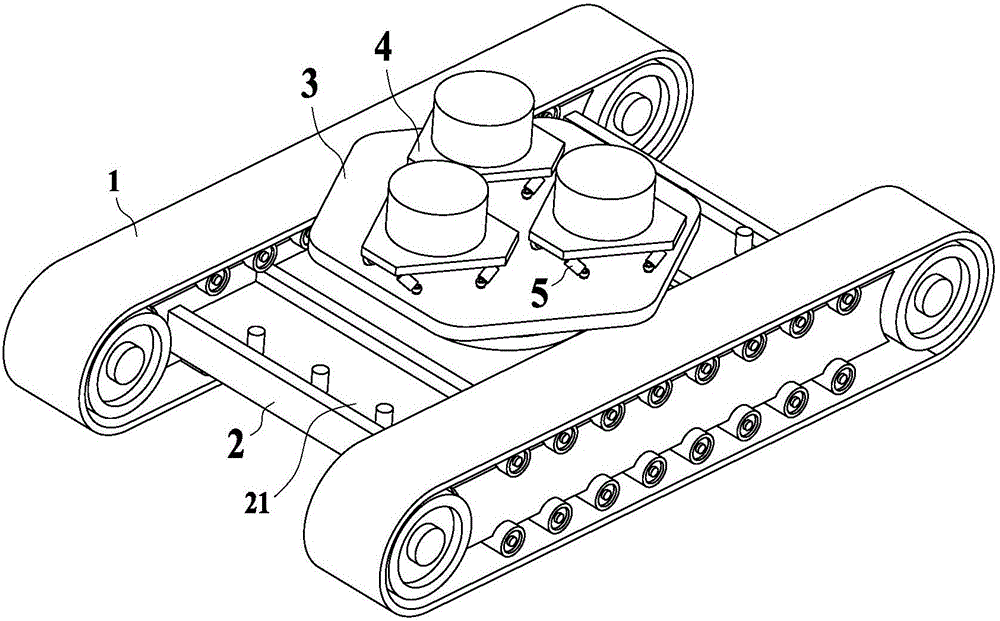
[0028] Such as figure 1 , figure 2 with image 3 As shown, a multi-arm cooperative palletizing robot described in the present invention includes a crawler traveling mechanism 1, a chassis 2, a rotary table 3, a fine-tuning platform 4, a fine-tuning cylinder 5 and a mechanical arm 6; the crawler traveling mechanism 1 Located on both sides of the chassis 2, the rotary table 3 is located in the middle of the chassis 2, the fine-tuning table 4 is located at the upper end of the rotary table 3, the fine-tuning cylinder 5 is located between the rotary table 3 and the fine-tuning table 4, and the mechanical The arm 6 is located at the upper end of the fine-tuning table 4, and the end of the mechanical arm 6 is equipped with a gripper.
[0029] The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com