Method for determining movement tracks of industrial robot
A kind of robot motion and robot technology, applied in the direction of instruments, manipulators, manufacturing tools, etc., can solve the problems that cannot be widely used in the field of complex surface processing, and the working space of industrial robots is limited, so as to shorten the planning time and improve the work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0045] This embodiment provides a method for determining the trajectory of an industrial robot, such as figure 1 As shown, the method includes the following steps:
[0046] In step 110, the robot tools are divided into rotary tools and non-rotary tools.
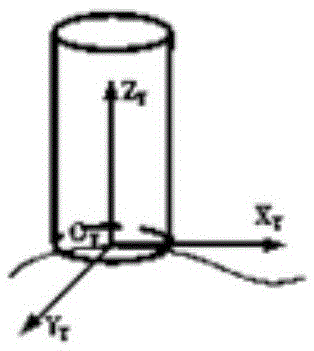
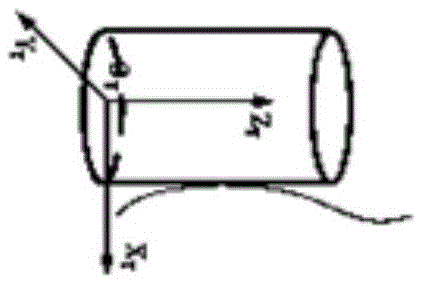
[0047] In this step, the robot tools include: cutting tools, grinding tools, welding tools, spraying tools, laser forming tools, deburring tools, polishing tools and 3D printing tools; the rotary tools include: cylindrical tools, conical Tools and quasi-cylindrical tools. The non-rotating tools include: cuboid tools and the like.
[0048]Step 111 , according to the contact mode between the robot tool and the workpiece, the rotary tool and the non-rotary tool are respectively one-to-one corresponding to the standard machining tool.
[0049] In this step, after the robot tools are divided into rotary tools and non-rotary tools, the rotary tools and non-rotary tools are in one-to-one correspondence with standard machining too...
Embodiment 2
[0071] In actual application, when the workpiece is a curved surface of automobile glass, for the curved surface of automobile glass, a robot grinding tool is selected, such as Figure 12As shown, the tool is a rotary tool, and the contact mode with the curved surface of the automobile glass is side contact, so the flat bottom knife is selected as the standard tool for five-axis CAM trajectory generation.
[0072] First of all, in CAM software such as NX, the trajectory planning of the surface processing area of the automobile glass is carried out. In the planning trajectory, a suitable flat-bottomed knife is selected as the machining tool for trajectory planning. The machining strategy is multi-axis variable contour milling, and the five-axis CAM trajectory, the trajectory such as Figure 13 shown.
[0073] Secondly, at first extract the tool location point and the tool axis vector data in the five-axis CAM track; Obtain ordered path point sequence P 1 , P 2 ......P i ....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com