Modular control method for four-rotor aircraft
A technology for a quadrotor aircraft and a control method, which is applied to controllers with specific characteristics, attitude control, electric controllers, etc., can solve the problems of inability to meet the demands of modular disassembly, sluggish flight control chips, and high replacement costs. Achieve the effect of simple structure, high degree of automation and easy operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0029] The modular control method for quadrotor aircraft involved in this embodiment specifically includes the following steps:
[0030] (1) The power supply and the voltage stabilizing circuit 4 provide suitable power for the normal operation of each module of the control board. After the control board is powered on, each module is initialized and interrupted. If a calibration signal is received at this time, the gyroscope 3 is cleared. Otherwise, the main control module 1 receives the data from the gyroscope module 3 and performs Kalman filtering, uses the quaternion to calculate the inclination angle to obtain the current attitude of the quadrotor aircraft, and applies the flight control method of the quadrotor aircraft based on the digital PID algorithm (that is, the ratio- Integral-derivative control), by selecting the control gain to make the system realize the desired performance, the parameters of the quadrotor aircraft are adjusted by the host computer software to obta...
Embodiment 2
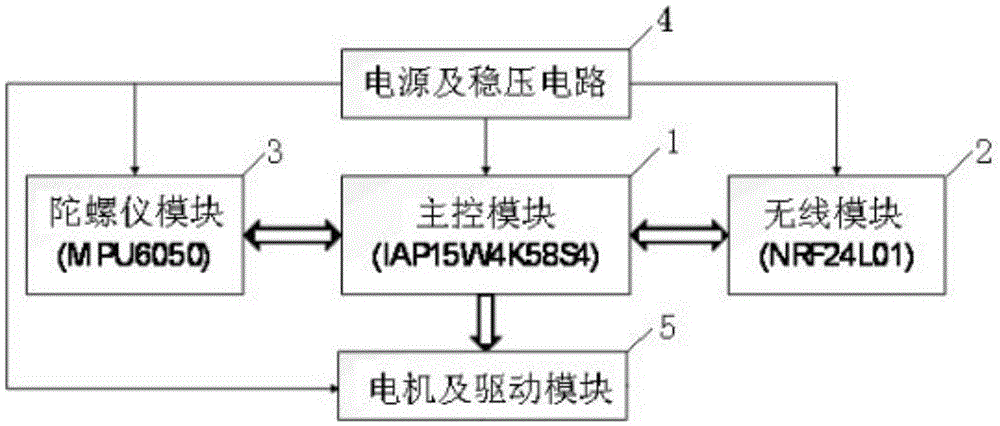
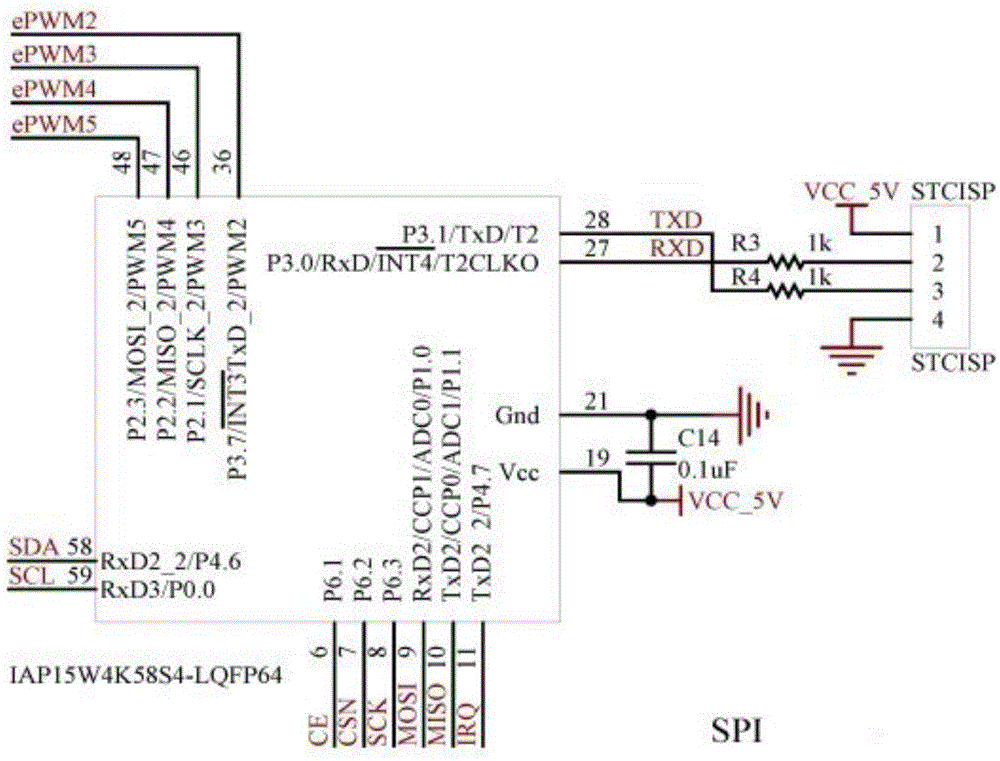
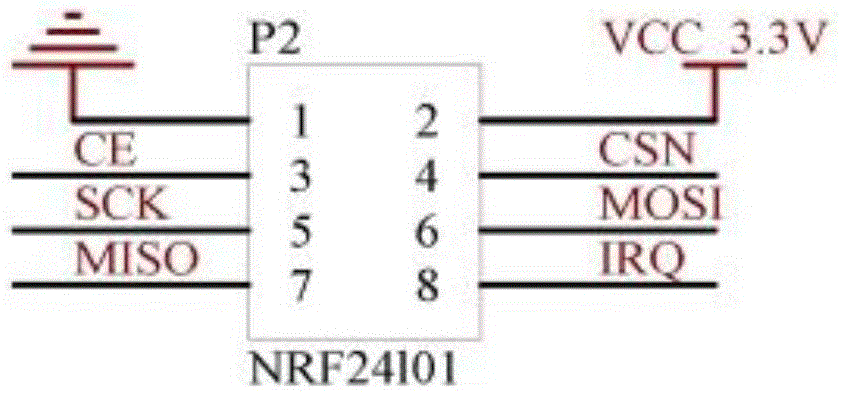
[0035] In this embodiment, the modular control method for quadrotor aircraft described in Embodiment 1 is taken as an example. The main structure of the modular control board used in it includes a main control module 1, a wireless module 2, a gyroscope module 3, a power supply And the voltage stabilizing circuit 4, the motor and the drive module 5, the power supply and the voltage stabilizing circuit 4 are respectively electrically connected with the main control module 1, the wireless module 2, the gyroscope module 3 and the motor and the driving module 5 to provide power, and the main control module 1 is respectively It is electrically connected with the wireless module 2, the gyroscope module 3 and the motor and the drive module 5, and is used to receive and process data information from the wireless module 2 and the gyroscope module 3. The wireless module 2 is responsible for transmitting control information, and the gyroscope module 3 is used for Detect flight attitude, mo...
Embodiment 3
[0042] At present, the flight control board PC software of quadrotor aircraft is mainly designed for 16-bit AVR single-chip microcomputer and 32-bit STM32 single-chip microcomputer. The domestic chip IAP15W4K58S4 single-chip microcomputer is the main control module 1 and there is no flight control board PC software for quad-rotor aircraft. Therefore, in the present embodiment, the host computer software for the main control module 1 domestic chip IAP15W4K58S4 single-chip microcomputer has been designed; the modular control board of the involved quadrotor aircraft can be connected with the host computer software through the USB interface to realize adjustment or modification of the quadrotor aircraft The function of PID parameter and display flight attitude; The upper computer software that described connection master control module 1 comprises flight attitude display and flight attitude control two parts:
[0043] (1) Flight attitude display (the specific process is as follows ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com