Method for estimating attitude angle of rescuing wrecker based on robust filtering
A robust filtering and wrecker technology, applied in navigation computing tools and other directions, can solve problems such as accuracy degradation, unsatisfactory estimation results, divergence, etc., and achieve low cost and easy large-scale promotion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0048] In recent years, my country's rescue wrecker industry has developed rapidly. However, according to the statistics of relevant departments, the accident rate of rescue wreckers rolling over or overturning is also increasing year by year. The reason is that, in addition to the subjective factors such as operators' violation of regulations, lack of experience and poor management, the attitude monitoring device of the rescue wrecker is not perfect, and it is unavoidable to be unable to provide accurate attitude information and safety warnings for the driver. factor. The patent "A Method for Estimating Attitude Angle of Rescue Wrecker Vehicle Based on Kalman Filter" (Patent No.: 201410279302) proposes a method for estimating pitch angle and roll angle of rescue wrecker vehicle based on Kalman filter. In the complex rescue environment, the estimation problem of pitch angle and roll angle of large angle. This method replaces a complete six-dimensional inertial measurement un...
Embodiment 2
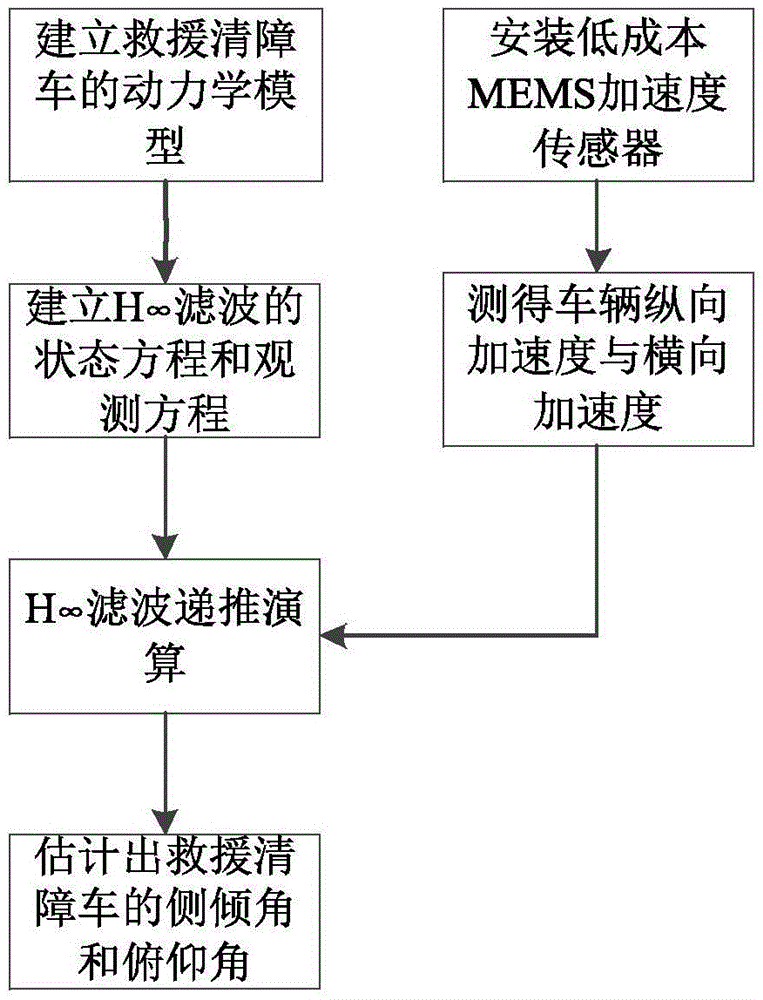
[0086] For checking the present invention proposes based on H ∞ The effect of the estimation method of the pitch angle and roll angle of the rescue wrecker with robust filtering is simulated in Matlab.
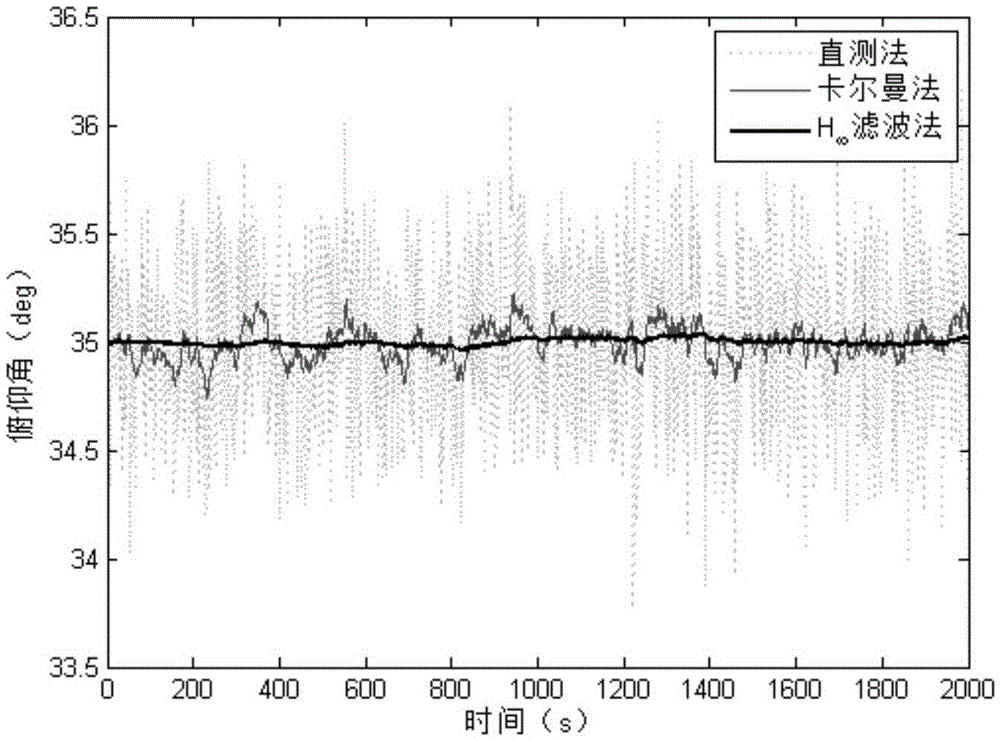
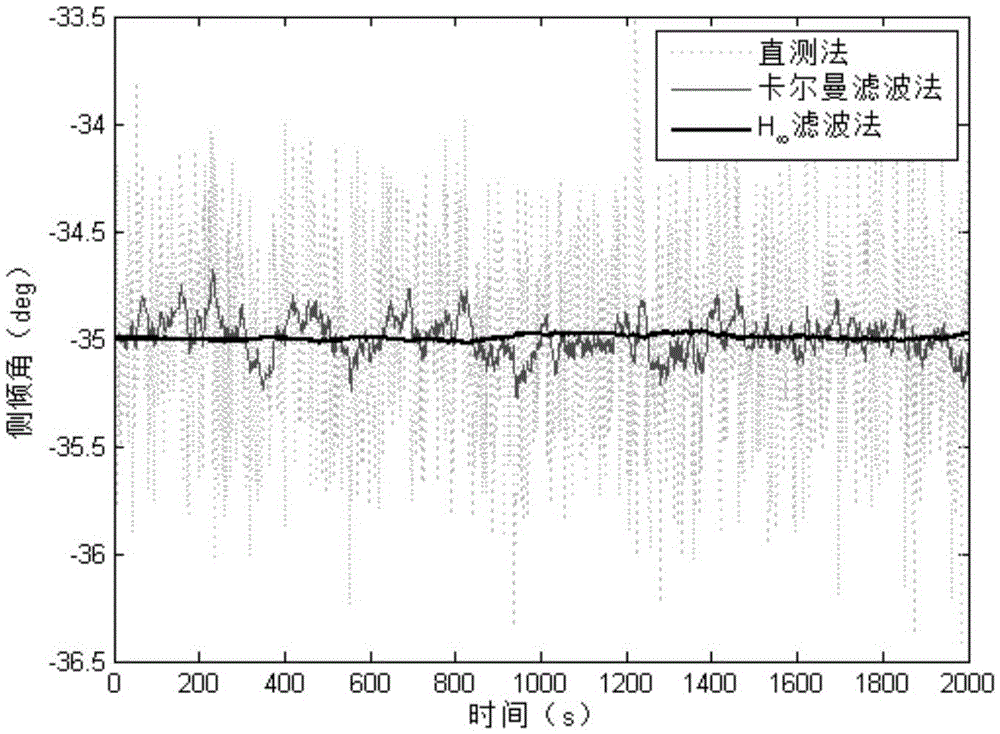
[0087] In order to verify the applicability of the method of the present invention for estimating the large-angle pitch angle and roll angle when the statistical characteristics of the interference signal cannot be known exactly, the H ∞ Filtering and direct measurement method, Kalman filtering method were simulated and compared. The pitch and roll angles are selected to be 35° and -35°, respectively. In the simulation, the measurement noise of longitudinal acceleration and lateral acceleration is set to a standard deviation of 0.05m / s 2 The colored noise, the distribution of the colored noise conforms to the second-order moving average model. Set H ∞ The gamma value in filtering is 1.3.
[0088] Table 1 and figure 2 , image 3 The results of simulation experiments are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com