Intelligent road tour inspection control method for multi-rotor-wing unmanned aerial vehicle
A multi-rotor UAV and intelligent road technology, which is applied in the field of highway intelligent inspection control, can solve the problems that the controller does not have strong anti-interference ability and self-adaptive ability, cannot realize long-distance flight, and has large navigation errors. Achieve the effect of good dynamic performance, good self-adaptation, and fast error elimination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
[0034] In order to achieve the above object, the present invention selects a small road as an example to realize the cruising of the small road.
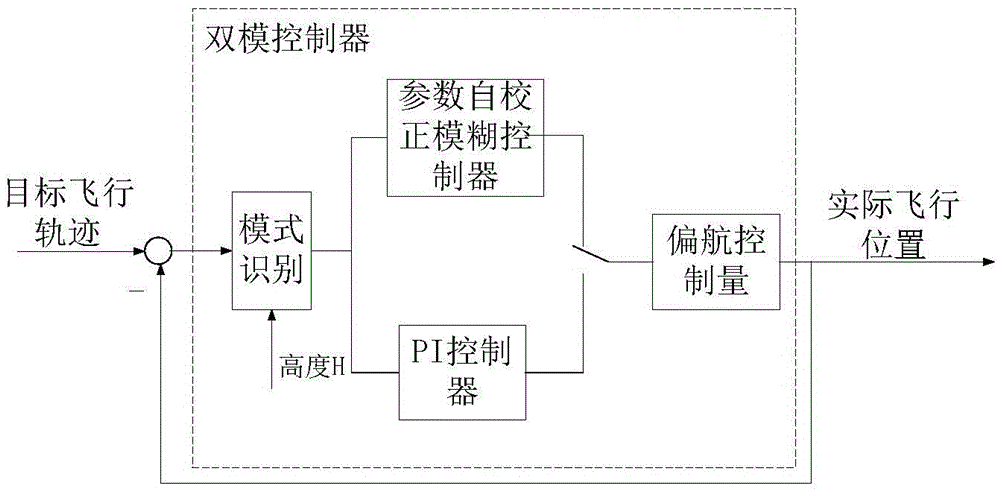
[0035] An intelligent road cruise control method for a multi-rotor UAV, the process is as follows Figure 4 shown, including:
[0036] Step 1: Obtain the road information directly below the drone by controlling the onboard gimbal image sensor of the drone so that it faces vertically downward.
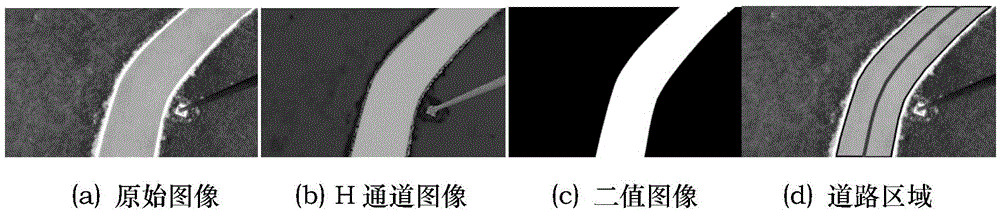
[0037] Step 2:: attach the acquired image information figure 1 The image processing shown:
[0038] 2a) Convert the captured image from RGB color space to HSV color space. The H channel represents the color information, which is measured by angle; the S channel represents the saturation, which refers to the ratio of the purity of the color to the maximum purity; the V channel represents the brightness of the colo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com