A soft robot module with multiple forms of motion
A motion form and robot technology, applied in the direction of manipulators, manufacturing tools, etc., can solve problems such as single motion form, difficult manufacturing, complex structure, etc., and achieve the effect of easy manufacturing, simple structure, and efficient driving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
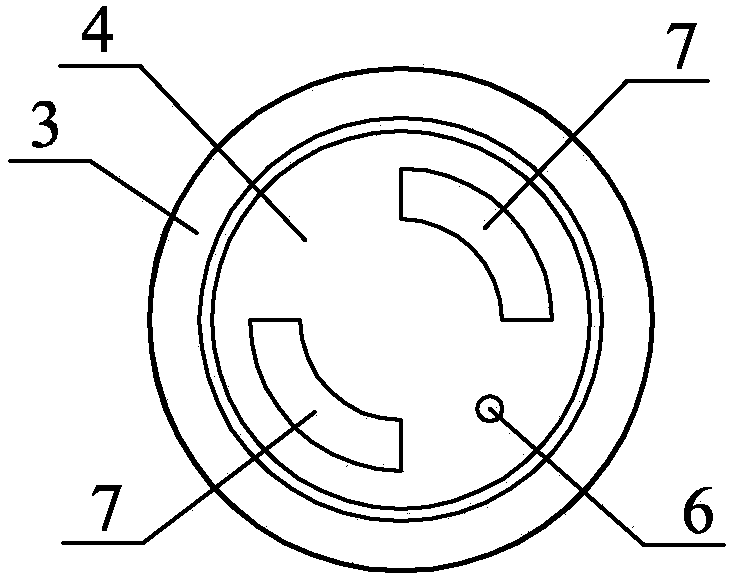
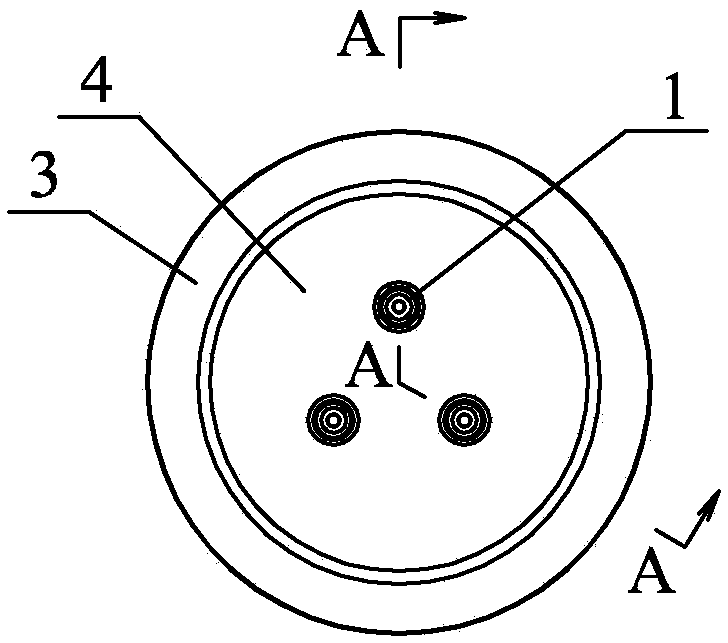
[0015] Specific implementation mode one: combine Figure 1 to Figure 5 Describe this embodiment. This embodiment includes an elastic body 4, three ventilation pipes 1 and several restraint rings 3. The elastic body 4 is cylindrical, and several restraint rings 3 are arranged at equal intervals in the axial direction of the elastic body 4. , the inner ring of the restraining ring 3 cooperates with the outer cylindrical surface of the elastic main body 4, and the rear end surface 5 of the elastic main body 4 is provided with a positioning hole 6 and two arc-shaped connecting grooves 7, and the two arc-shaped connecting grooves 7 are connected with the elastic main body 4 The axial center line is arranged symmetrically, the arc-shaped connecting groove 7 is used for the connection of the adjacent soft robot modules, the positioning hole 6 is used for the positioning of the adjacent soft robot modules, and the elastic body 4 is provided with three drive inner cavities 9, and the th...
specific Embodiment approach 2
[0016] Specific implementation mode two: combination Figure 4 To describe this embodiment, the ventilation tube 1 of this embodiment is made of photosensitive resin, which is processed by 3D printing. Other compositions and connections are the same as those in Embodiment 1 or Embodiment 2.
specific Embodiment approach 3
[0017] Specific implementation mode three: combination Figure 5 Describe this embodiment, the air pipe 1 of this embodiment is connected with an external air pump or hydraulic pump, the air pipe 1 is used to introduce and export the driving air pressure to the driving inner chamber 9, and form various forms of air pressure through the deformation and cooperation of the three driving inner chambers 9. sports. Other components and connections are the same as those in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com