Scene recovery method and device based on low-quality GRB-D data
A GRB-D, low-quality technology, applied in the field of 3D modeling, can solve the problem of high accuracy requirements of manual interactive acquisition equipment, and achieve the effect of improving the accuracy rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The technical solution of the present invention will be further described in detail in conjunction with the accompanying drawings and embodiments.
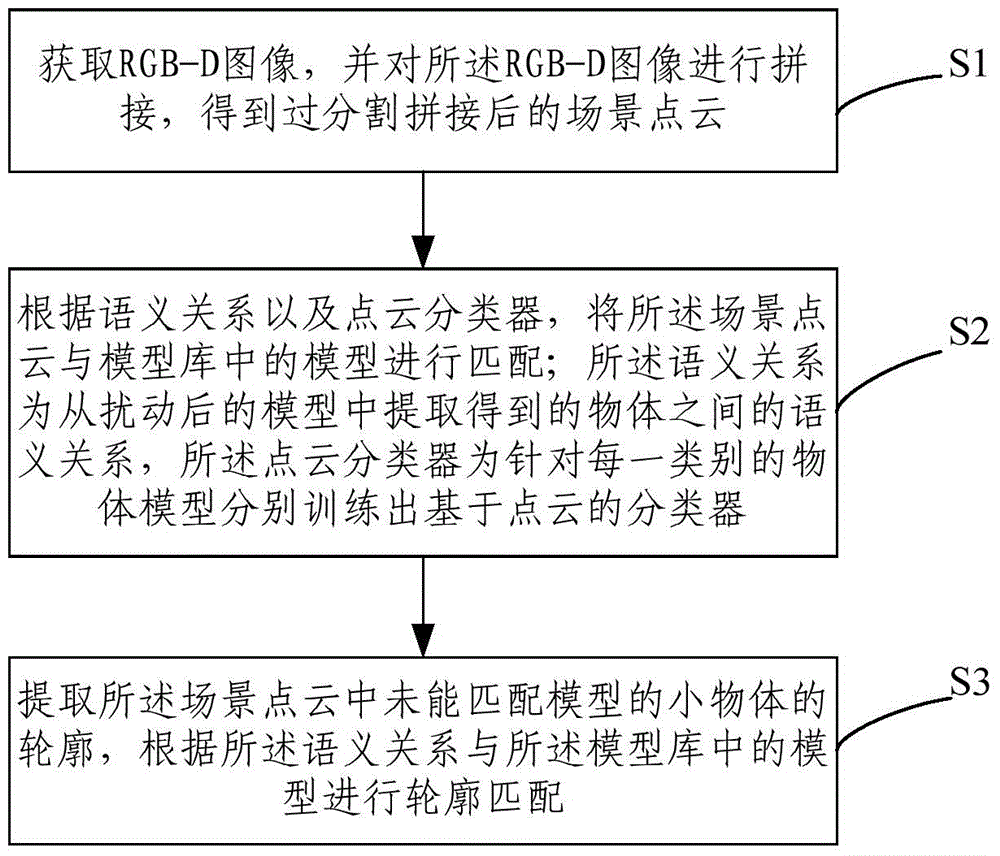
[0043] figure 1 A schematic flow diagram of a scene recovery method based on low-quality GRB-D data in this embodiment is shown, as shown in figure 1 As shown, the scene recovery method based on low-quality GRB-D data provided by this embodiment includes:
[0044] S1. Acquire RGB-D images, and stitch the RGB-D images to obtain scene point clouds after over-segmentation and stitching.
[0045] For example, for a group of RGB-D images of a target scene, it includes both RGB (color) image information and Depth (depth) image information. According to the Depth image information of the image, the group of images can be over-segmented by computer Stitching into a complete scene point cloud.
[0046] S2. Match the scene point cloud with the model in the model library according to the semantic relationship and the point cloud cl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com