System and method for capturing hand movement function based on data glove and position tracker
A data glove and motion function technology, which is applied in the field of human motion function capture system, can solve problems such as difficulty in calibration of grasping posture data, difficulty in capturing human motion function, etc., and achieve the effect of improving accuracy and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
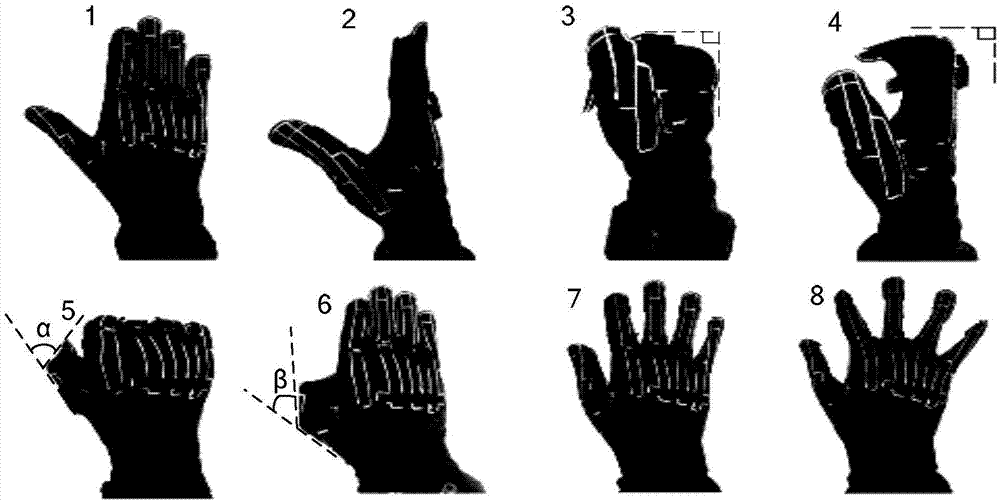
[0044] Specific embodiment one: reference figure 1 with 2 Specific description of this embodiment, the human hand motion function capture system based on data gloves and position tracker described in this embodiment includes the following units:
[0045] Data glove sensor initial value recording unit: collects and records the initial value of each sensor in the data glove, and sends the initial value to the data glove sensor calibration unit. The initial value is the data glove calibration experiment The angle value of each joint under the paradigm;
[0046] Data glove sensor calibration unit: use the initial value and the given value of the actual angle to establish the mapping model and model parameters between the actual angle and the initial value, and send the mapping model and model parameters to the sensor actual value obtaining unit after calibration. The actual angle given value is preset;
[0047] Data glove sensor grasping posture acquisition unit: collect and record the ...
specific Embodiment approach 2
[0065] Embodiment 2: This embodiment further explains the human hand movement function capture system based on data gloves and position tracker described in Embodiment 1. In this embodiment, all units are embedded in the PC, and the data glove And the position tracker sends the collected signal to the PC through the serial port.
[0066] In practical application, the data glove is used to collect the angle value of the finger joints when the human hand grasps the posture. The finger joint angle signal output terminal of each sensor in the data glove is connected to the finger joint angle signal input terminal of the PC; the position tracker is used to collect The position and posture information of the human hand wrist, the position and posture signal output terminal of the human hand wrist of the position tracker is connected to the position and posture signal input terminal of the human hand wrist of the PC.
[0067] The PC is used as the system hardware platform. After the manua...
specific Embodiment approach 3
[0068] Embodiment 3: This embodiment further explains the human hand motion function capture system based on data gloves and position tracker described in Embodiment 1. In this embodiment, the actual value of the sensor and the wrist position after calibration in the storage unit The posture data are stored in the text file in turn.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com