Tree point cloud three-dimensional reconstruction method based on local structure and direction perception
A technology of local structure and orientation awareness, applied in the field of spatial information, it can solve the problems of skeleton geometric topology correlation distortion, high noise of measurement data, missing point cloud, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
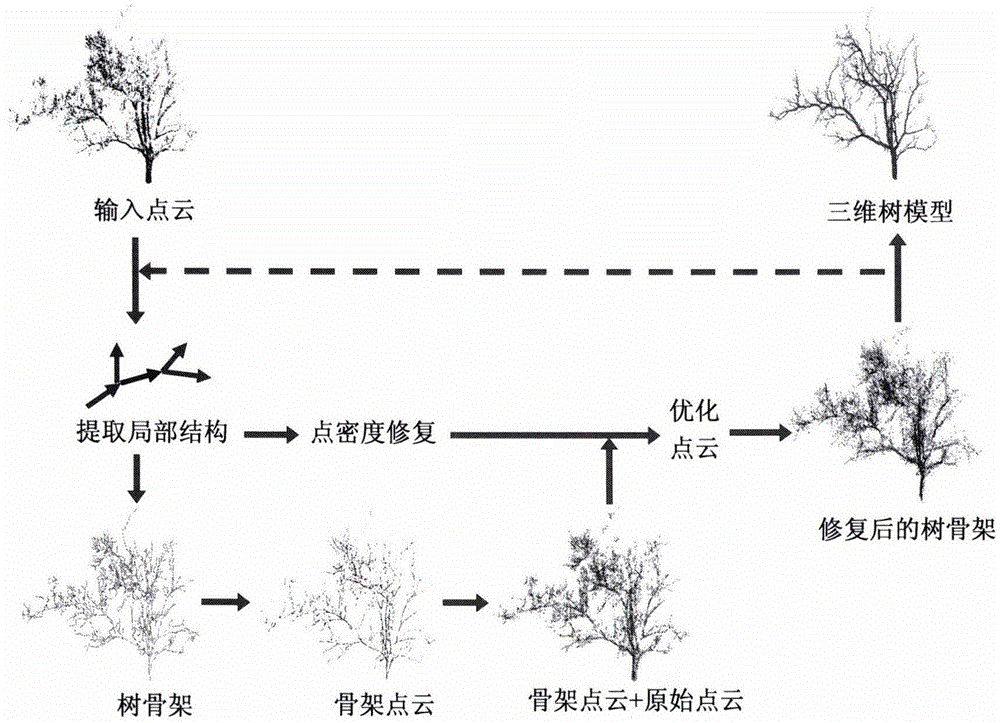
Method used
Image

Examples
Embodiment 1
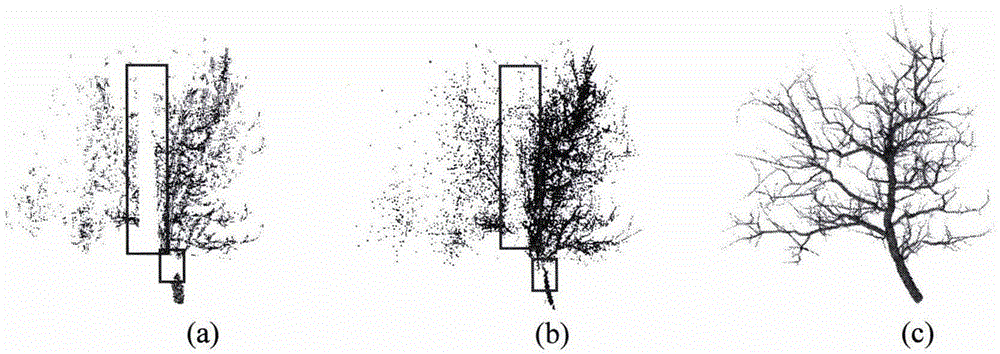
[0117] Using RIEGLLMS-Z620 terrestrial lidar scanner to obtain tree point cloud by single-station scanning, the vertical resolution and horizontal resolution during scanning are both 0.057°, the distance between the scene trees and the scanner is different, the distant trees are covered by the front Blocking by ground objects, resulting in missing data and uneven point density. The above tree point cloud was 3D modeled on an InterCore(TM) i7-4790 3.6GHZ computer with 4GB of memory.
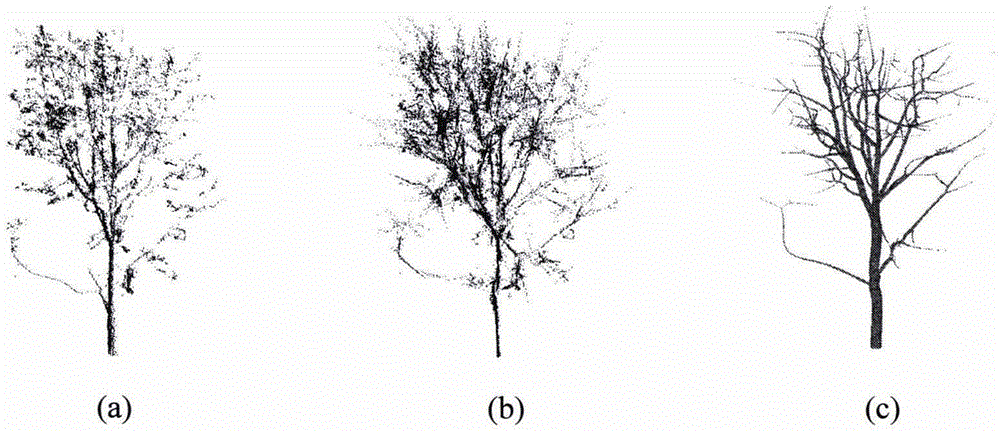
[0118] figure 2 (a) is the point cloud data of a tree that is closer to the scanner. The point density of the tree is higher, but the branches of the canopy are more and slender. Self-occlusion causes a jump in the point density of the local area, and the The point cloud on one side of the scanner is extremely sparse. figure 2 (b) is the new point cloud data after repairing the original point cloud, from which the 3D model of the tree is reconstructed ( figure 2 c). From figure 2 (c) It c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com