Self-adaptive adjustment method of aeromagnetic interference compensation coefficient
A technology of self-adaptive adjustment and interference compensation, which can be used in electrical/magnetic exploration, re-radiation of sound waves, radio wave measurement systems, etc., and can solve problems such as inaccurate aeromagnetic interference compensation coefficients.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach 1
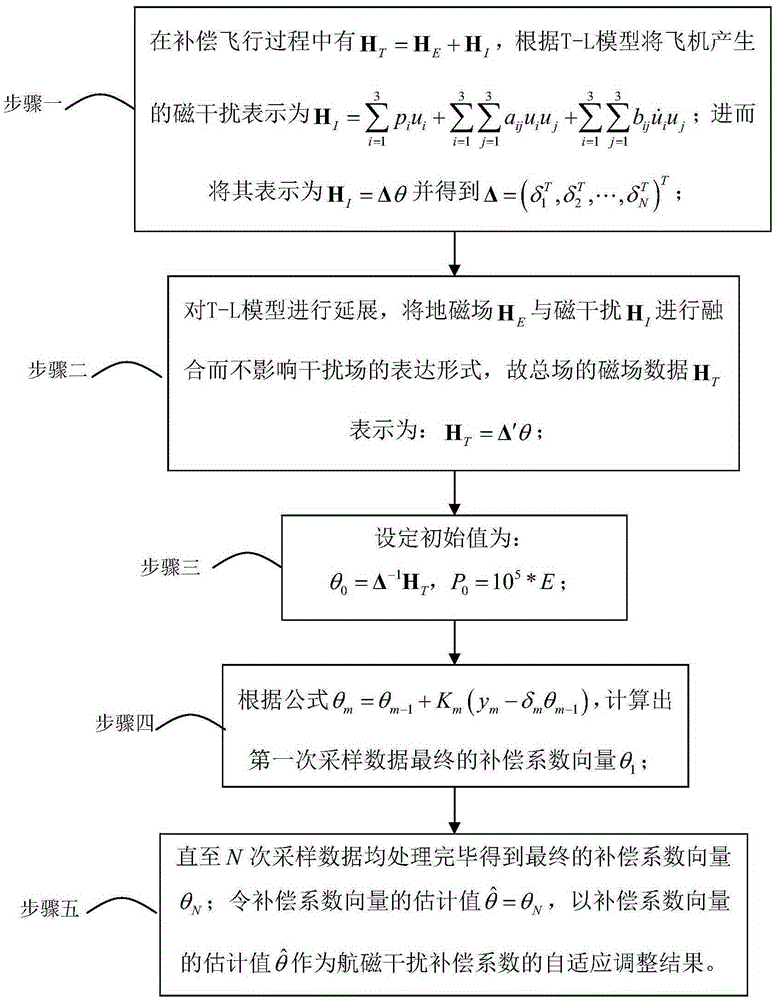
[0042] Specific implementation mode one: combine figure 1 To describe this embodiment,
[0043] An adaptive adjustment method for aeromagnetic interference compensation coefficient, comprising the following steps
[0044] Step 1. Obtain the magnetic interference H I with matrix Δ:
[0045] During the compensation flight, the total field magnetic field data measured by the total field magnetometer is H T , is an N×1 column vector; the geomagnetic field is H E , is an N×1 column vector; the magnetic interference generated by the aircraft is H I , is an N×1 column vector; the relationship between the three is:
[0046] h T =H E +H I (1)
[0047] The purpose of aeromagnetic compensation is through the measured H T to determine H E , by calculating H through the magnetic interference model I ;
[0048] The T-L model is currently a widely used magnetic interference model, which takes the magnetic interference H generated by the aircraft at a certain moment I Expressed ...
specific Embodiment approach 2
[0078] u described in step 1 of this embodiment i It is achieved through the following steps:
[0079] Measure the magnetic field magnitude v of the three axial components of the aircraft 1 , v 2 , v 3 , and then determine u according to formula (3) i
[0080] u i = v i v 1 2 + v 2 2 + v 3 2 - - - ( 3 )
[0081] Among them, i=1,2,3.
[0082] Other steps and parameters are the same as in the first embodiment.
specific Embodiment approach 3
[0083] K described in step 4 of this embodiment m The update formula for is:
[0084] K m = P m - 1 δ m T ( 1 + δ m P m - 1 δ m T ) - 1 - - - ( 9 )
[0085] in,(·) T means transpose, P m is the covariance matrix with a size of 16×16 dimensions.
[0086] Other steps and parameters are the same as in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com