Control method and system of movable carrier and control system of unmanned plane
A technology of a mobile carrier and a control method, applied in the field of control, can solve the problems of difficulty in completing police monitoring, abnormal mobile carrier, disaster monitoring, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0043] According to an embodiment of the present invention, a method embodiment of a method for controlling a movable carrier is provided. It should be noted that the steps shown in the flowcharts of the accompanying drawings can be executed in a computer system such as a set of computer-executable instructions , and, although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
[0044] figure 2 is a flowchart of a method for controlling a movable carrier according to an embodiment of the present invention, such as figure 2 As shown, the method includes the following steps:
[0045] Step S202, when the control terminal learns that the main movable carrier is abnormal, it controls the backup movable carrier to take over the battery life of the main movable carrier, and after the replacement is successful, the backup movable carrier continues to perform the work task...
Embodiment 2
[0103] According to an embodiment of the present invention, an apparatus embodiment of a control system for a movable carrier is provided.
[0104] Figure 7 is a schematic diagram of a control system of a movable carrier according to an embodiment of the present invention, such as Figure 7As shown, the system: a primary removable carrier 702 , a backup removable carrier 704 , and a control terminal 708 . The main movable carrier 702 is used to perform work tasks; the control terminal 708 is used to control the backup movable carrier 704 to replace the main movable carrier 702 when it is known that the main movable carrier 702 is abnormal; the backup movable carrier 704 is used to After the replacement is successful, the work task being executed by the active removable carrier 702 is continued.
[0105] It should be noted that, in this embodiment of the present invention, the spare removable carrier may include one or more. In the case of only one backup movable carrier, b...
Embodiment 3
[0115] According to an embodiment of the present invention, another device embodiment of a control system for a movable carrier is provided.
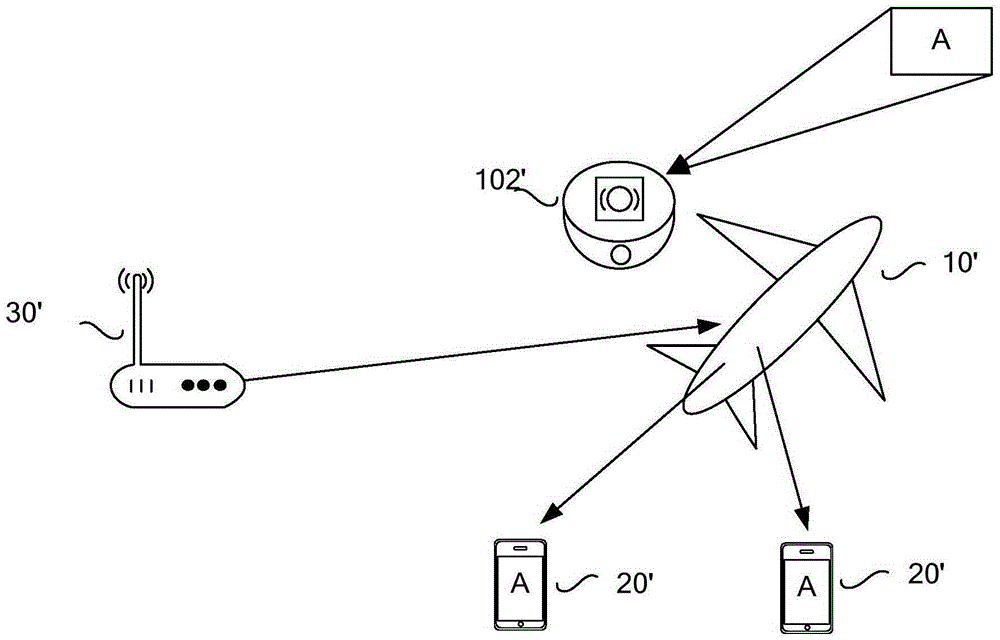
[0116] Figure 8 is a schematic diagram of another optional mobile carrier control system according to an embodiment of the present invention, such as Figure 8 As shown, the system includes: a main UAV 802 , a backup UAV 804 , receiving terminals 706 (two are shown in the figure) and a control terminal 708 . The main drone 802 is used to perform work tasks; the control terminal 708 is used to control the backup drone 804 to take over the battery life of the main drone 802 when the main drone 802 is abnormal; the backup drone 804, It is used to continue to perform the work tasks being performed by the main UAV 802 after the battery life is successfully taken over.
[0117] Optionally, the above-mentioned work tasks may include: monitoring tasks and communication tasks, and the abnormal occurrence of the main movable carrier may includ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com