A partially time-delay-dependent out-of-sequence controller and its establishment method
A controller and time-delay technology, which is applied to a partial time-delay-dependent out-of-sequence controller and its establishment field, can solve the problem of packet loss, complex analysis and synthesis, and a time-delay-dependent out-of-sequence controller without a good design method And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
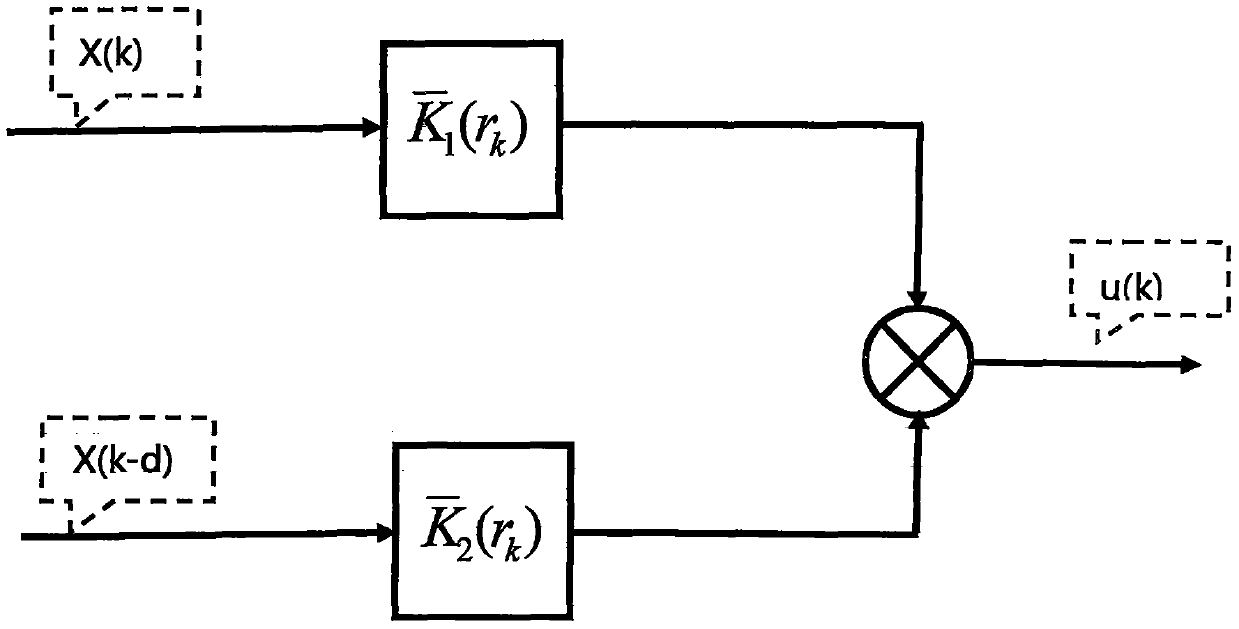
[0075] Embodiment 1, the controller obtained by the first method (that is, the stabilized controller relying on the new operation mode). refer to figure 1 and image 3 The first method results in a controller Including system state x(k), controller gain and Delay d≥0; firstly, a partially time-delay-dependent controller should be established (see image 3 ), ie u(k)=α(k)K 1 x(k)+(1-α(k))K 2 x(k-d); the values of the random variable α(k) are α(k)=1 and α(k)=0 respectively; and when α(k)=1, u(k)=K 1 x(k); when α(k)=0, u(k)=K 2 x(k-d); rewrite the partially time-delay dependent controller as Control gain is and mode of operation {η k , k∈Z} in the finite set S 1 = Value in {0, 1}; in the establishment process such as image 3 As shown, it is necessary to establish a controller with a disordered sequence between the system state and the control gain; introduce another random variable β(k) to describe the disordered situation between the system state and the co...
Embodiment 2
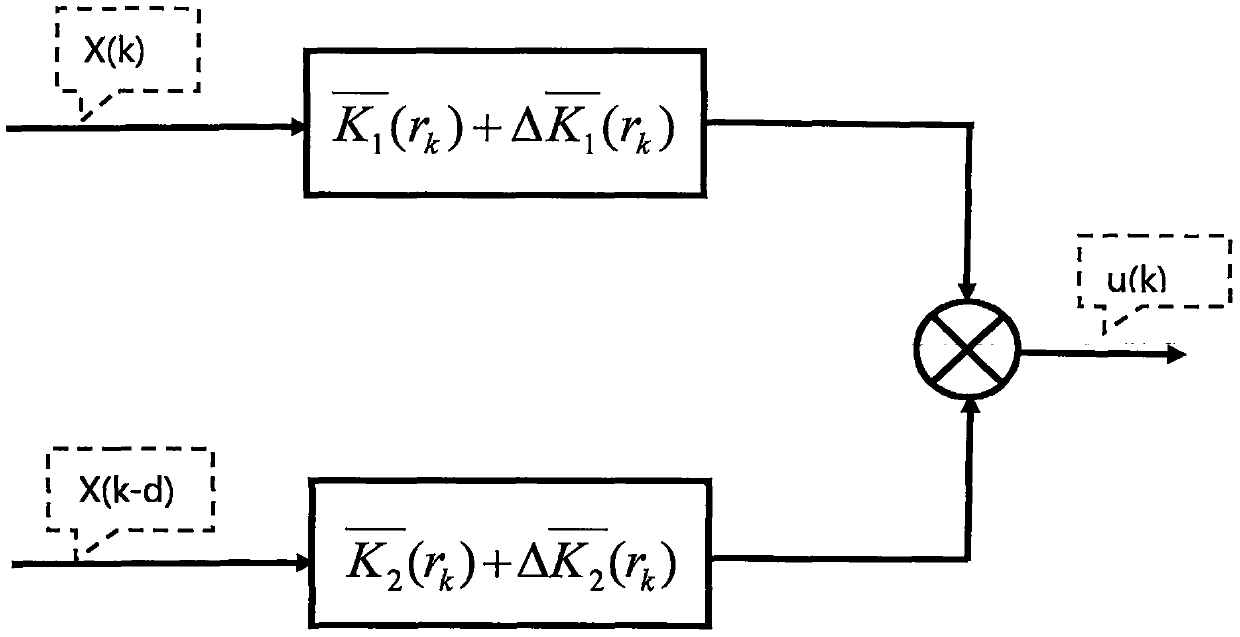
[0076] The embodiment of embodiment 2, the controller obtained by the second method (i.e. another kind of stabilization controller that only depends on one of the original operating modes) is basically the same as embodiment 1, the only difference is that embodiment 2 is implementing On the basis of Example 1, the second controller is obtained by applying the non-fragile control method, namely Including system state x(k), controller gain and Delay d≥0; control gain disturbance is and and satisfy q=1, 2, δ k (r k ) to be determined; when considering , can be constructed with η k related controller gain, and its mode of operation depends only on η k , based on this, we get the corresponding controller gain as
[0077]
[0078] Such as Figure 5 The controller shown can also make the closed-loop system stable by solving the appropriate control gain, and the above constitutes the second controller.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com