Information processing method and electronic device
An information processing method and technology of electronic equipment, applied in the field of electronics, can solve the problems of prolonging the map construction cycle and slow speed, and achieve the effect of shortening the cycle and rapid extraction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0031] An embodiment of the present invention provides an information processing method, which is applied to an electronic device. For example, the electronic device can be an intelligent robot, and the intelligent robot has an image acquisition unit as a preferred example. The image acquisition unit in the embodiment of the present invention can be a three-dimensional ( 3D, 3Dimensions) camera. In the process of specific implementation, the 3D camera can have an RGB-D sensor, R, G, and B in the RGB-D sensor represent red (Red), green (Green) and blue (Blue), and the RGB-D sensor The D in represents the depth (Depth), and the most representative sensor of the RGB-D sensor is the Kinect3D sensor of Microsoft Corporation. The RGB-D sensor is used to generally refer to a sensor that can simultaneously obtain color information (RGB) and depth information (Depth) of the environment.
[0032] Picture 1-1 It is a schematic diagram of the implementation flow of an information proces...
Embodiment 2
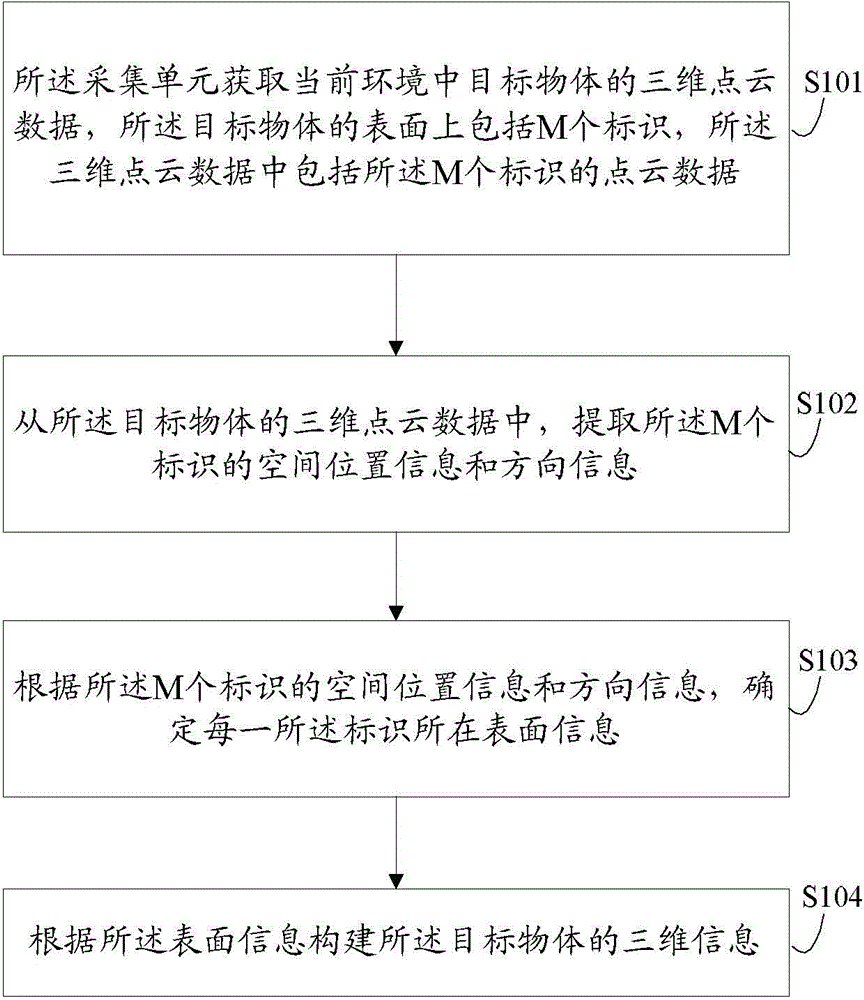
[0049] Based on the first embodiment above, the embodiment of the present invention provides an information processing method, which is applied to an electronic device, figure 2 It is a schematic diagram of the implementation flow of the information processing method in Embodiment 2 of the present invention, such as figure 2 As shown, the method includes:
[0050] Step S201, the acquisition unit acquires the three-dimensional point cloud data of the target object in the current environment, the surface of the target object includes M markers, and the three-dimensional point cloud data includes the point cloud data of the M markers;
[0051] Here, the M is an integer greater than or equal to 1;
[0052] Step S202, extracting spatial position information and direction information of the M markers from the 3D point cloud data of the target object;
[0053] Step S203, extracting each identified surrounding point cloud data according to a preset or determined threshold range; ...
Embodiment 3
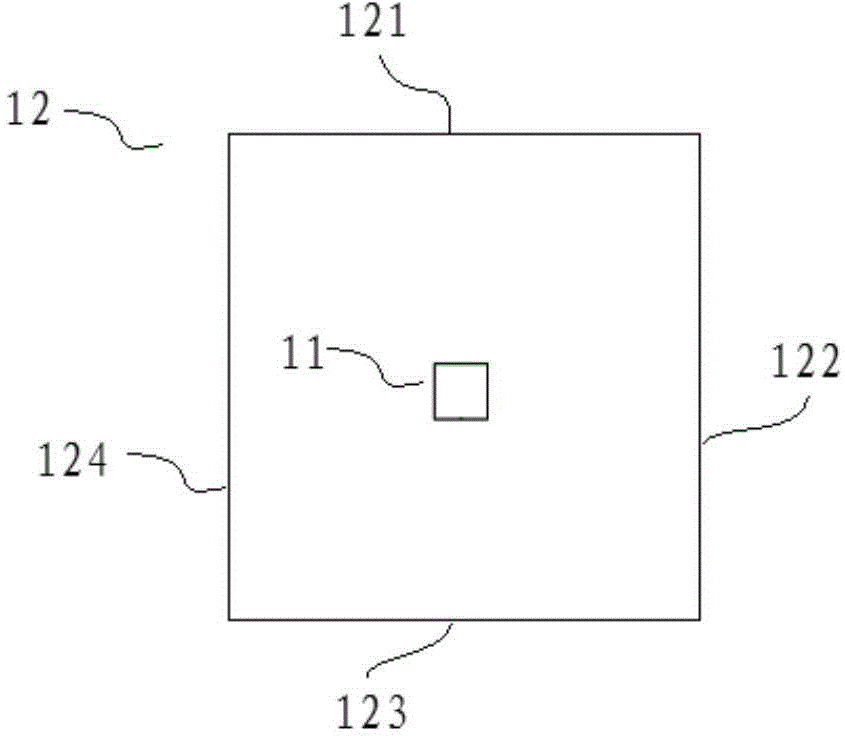
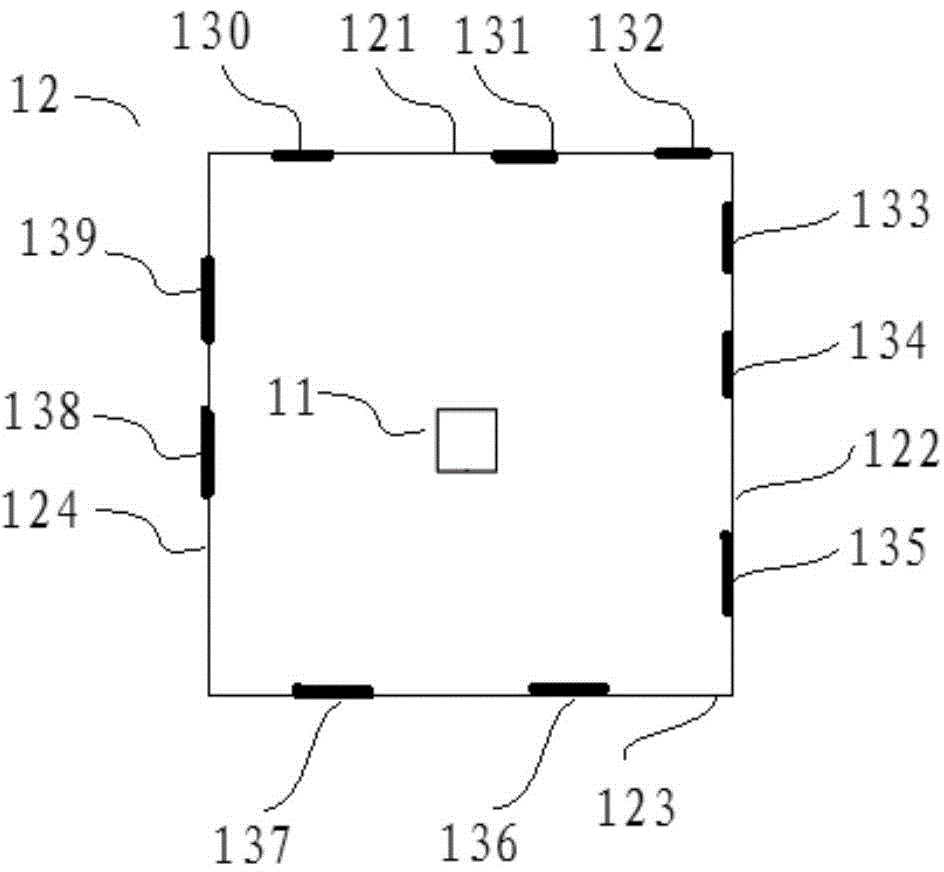
[0062] Based on the above-mentioned second embodiment, the embodiment of the present invention provides an information processing method, which is applied to electronic equipment. In this method, a method for determining the above-mentioned threshold range will be provided. In this method, firstly, the extracted target object Two or more logos are attached on the surface. Figure 3-1 It is a schematic diagram of the implementation flow of the information processing method in Embodiment 3 of the present invention, as Figure 3-1 As shown, the method includes:
[0063] Step S301, the acquisition unit acquires the three-dimensional point cloud data of the target object in the current environment, the surface of the target object includes M markers, and the three-dimensional point cloud data includes the point cloud data of the M markers;
[0064] Here, the M is an integer greater than or equal to 1;
[0065] Here, each surface of the target object to be extracted includes at le...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com