Multi-model self-adaptive state estimation method and system based on ls
A state estimation and self-adaptive technology, applied in the field of data fusion, which can solve the problems of reduced state estimation accuracy and filter divergence.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
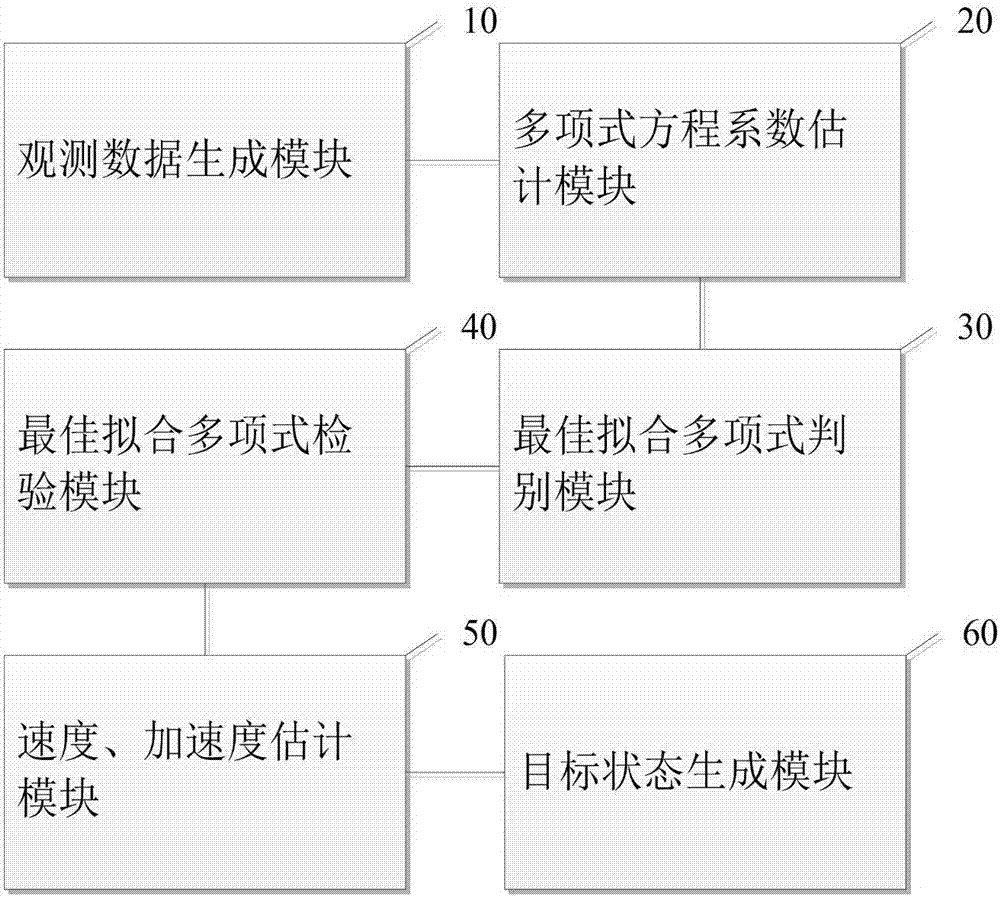
[0025] Such as figure 1 Shown, a kind of LS-based multi-model adaptive state estimation method, it comprises the following steps:
[0026] S1. Obtain the observation sequence of each sensor on the same moving target, select the coordinates of the center reference point, and calculate the spatial Cartesian coordinates of each point in the moving target observation sequence relative to the central reference point, forming the spatial Cartesian coordinate system of the moving target at different times Sequence of observations in X, Y, and Z directions. The purpose of this step S1 is to express the coordinates expressed by the longitude and latitude of the moving target as expressed by spatial rectangular coordinates in the X, Y, and Z directions of the spatial rectangular coordinate system.
[0027] Optionally,
[0028] The observation sequence of each sensor in the step S1 to the same moving target is Preset each detection platform in the common coordinate system, where j re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com