Farmland multiple robot following land cultivation system based on stereo visual sense visual sense and method for the same
A stereoscopic vision and multi-robot technology, applied in the direction of two-dimensional position/channel control, comprehensive factory control, electrical program control, etc., can solve problems such as robot coordination and positioning problems, unfavorable farmland robot operations, and robots are easy to interfere with each other. Facilitate human-computer interaction, improve environmental recognition sensitivity, and improve flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with accompanying drawing.
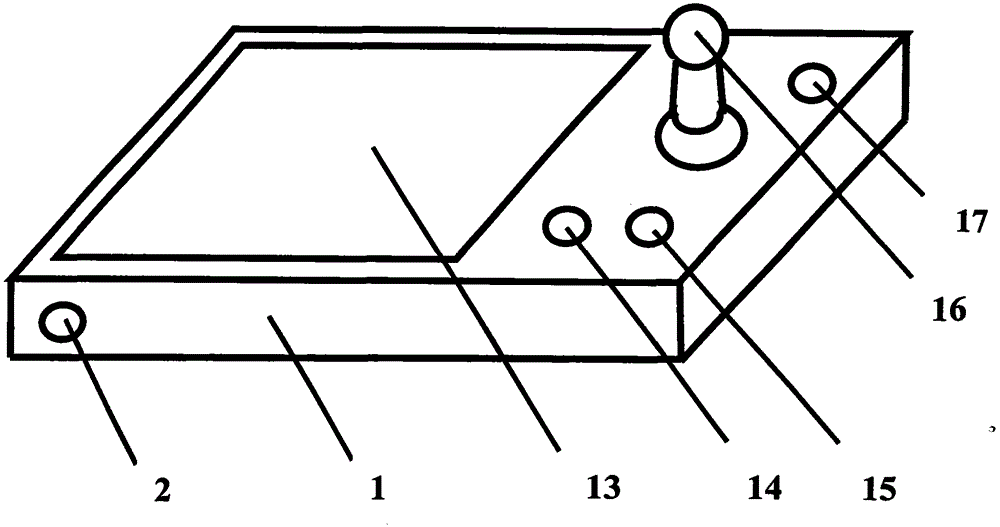
[0026] figure 1 Shown is the touch-screen joystick-type control terminal, that is, the human-computer interaction platform, which is used to remotely control the pilot robot and control the operation status and follow-up mode conversion of the cultivator following the robot. It includes a touch screen display module 13, a joystick module 16, a central processing unit, a wireless communication module, and a built-in battery. The touch screen display module is used to display robot status information, robot camera images and input manual control information. The joystick module has four control directions: front, rear, left, and right. When the pilot robot is remotely controlled, the joystick is used to control the forward, reverse and steering of the robot. When the joystick is centered, the robot stops running and is on standby. The central processing unit is used to proc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com