Real-time soft tissue deformation amount measurement method in robot-assisted flexible needle penetration experiments on soft tissues
A real-time measurement and soft tissue technology, applied in the field of minimally invasive surgical medical devices, can solve problems such as large errors, inappropriateness, and difficult measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
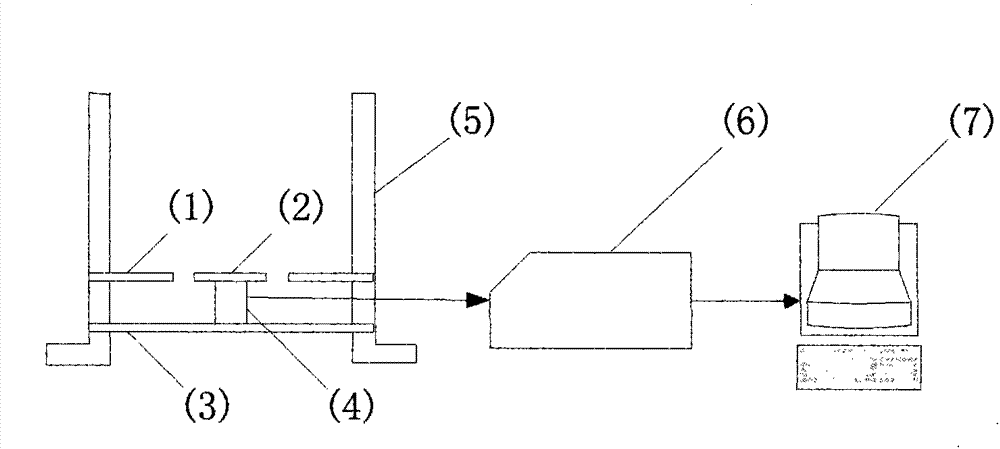
[0015] figure 1 It is a schematic diagram of the device described in the patent of the present invention.
[0016] The reference signs are as follows: a six-axis force sensor 1 , a rectangular bottom plate 2 , a rectangular tissue support plate 3 with a hole in the center, and a circular tissue tray 4 .
[0017] Among them, the bottom of the rectangular bottom plate 2 and the six-axis force sensor 1 are fixed with bolts, and fixed to the bottom of the tissue container box through a chute. , the central holes of 4 and 3 are concentric and should be on the same plane, the circular tissue tray 4 is fixed with the six-axis mechanical sensor 1 by bolts, and the tissue support plate 3 is also fixed on the tissue container box through a chute.
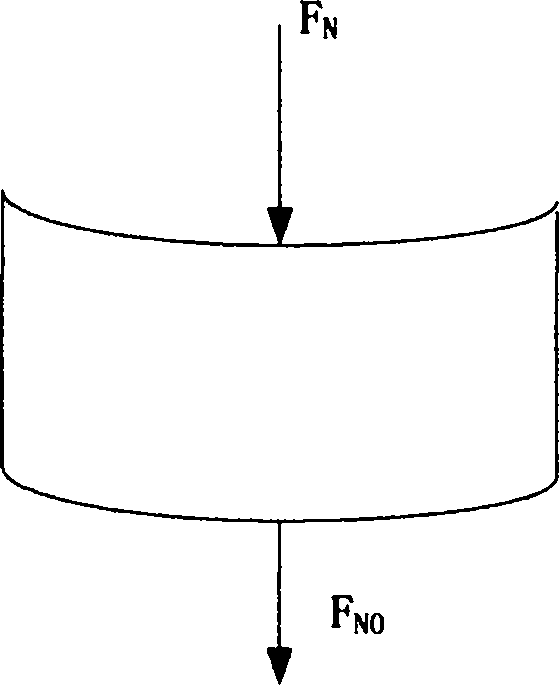
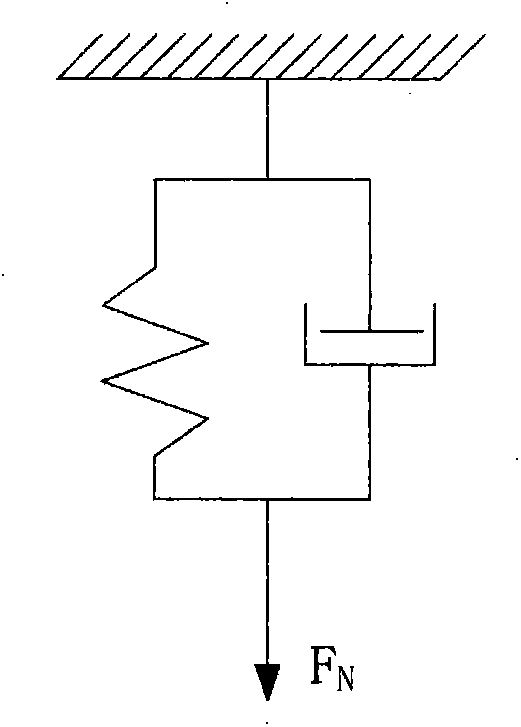
[0018] figure 2 It is a schematic diagram of soft tissue stress and transmission described in the patent of the present invention.
[0019] Since soft tissue is a viscoelastic material, when the extrusion force against the tissue is trans...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com