Autonomous attitude maneuver control method of deep space probe
A technology for deep space detectors and attitude maneuvering, which is applied in attitude control and other directions, and can solve problems such as shortening time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0066] A kind of autonomous attitude maneuver control method of deep space probe disclosed in this example, the specific implementation steps are as follows:
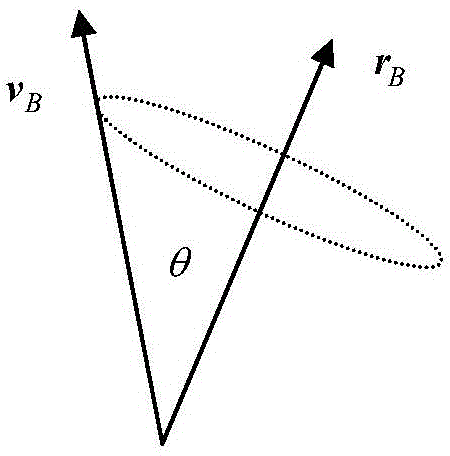
[0067] Step 1: Determine the vector of the sun in the inertial system as r according to the ephemeris time at the moment of attitude maneuver I =[1 0 0] T , and then determine the attitude transformation matrix from the inertial system to the detector body coordinate system as C BI = 0.4602 - 0.6354 0.6201 - 0.8786 - 0.4261 0.2156 0.1272 - 0.6440 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com