A mobile robot image stitching method and device
An image stitching and image technology, applied in the field of robot vision, can solve the problems of fusion image blurring, splicing image blurring, fusion image ghosting, etc., and achieve high robustness and eliminate ghosting effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
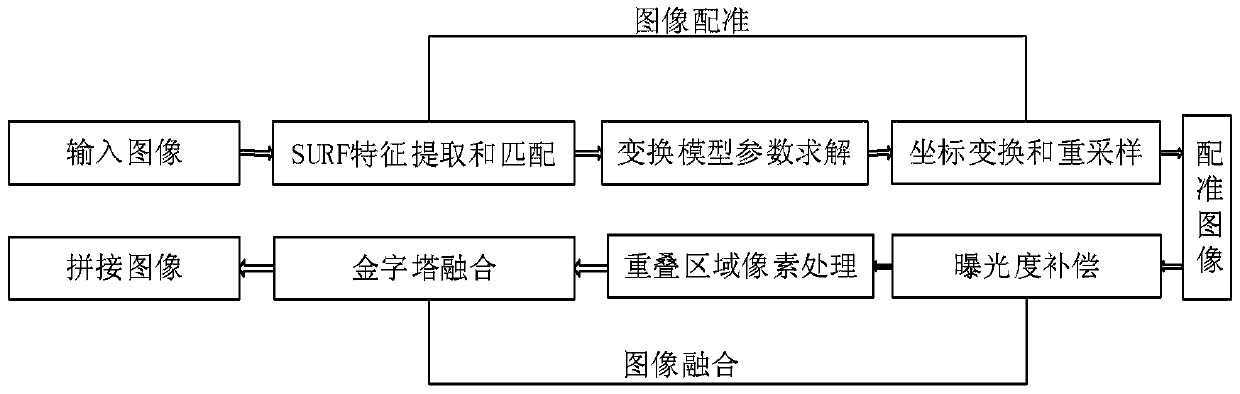
[0029] The two key technologies of image stitching are image registration and image fusion. The present invention adopts a feature-based method to realize image registration. The SURF algorithm is used to extract the feature points of the image and form a 64-dimensional feature vector. By finding the matching feature points, the geometric transformation relationship between the images is estimated to realize image registration. The registration algorithm adopted by the invention has good robustness to the situations of exposure differences and complex geometric deformations between images, and ideal registration results can be obtained in practical applications. In the image fusion stage, in order to solve the difference i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com