Video-acquisition-based Visual Map database establishing method and indoor visual positioning method using database
A technology for video capture and visual positioning, applied in the field of indoor positioning and navigation, can solve the problems of low indoor visual positioning accuracy, time-consuming and labor-intensive, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
[0073] The specific embodiment one, based on the Visual Map database establishment method of video collection, it may further comprise the steps:
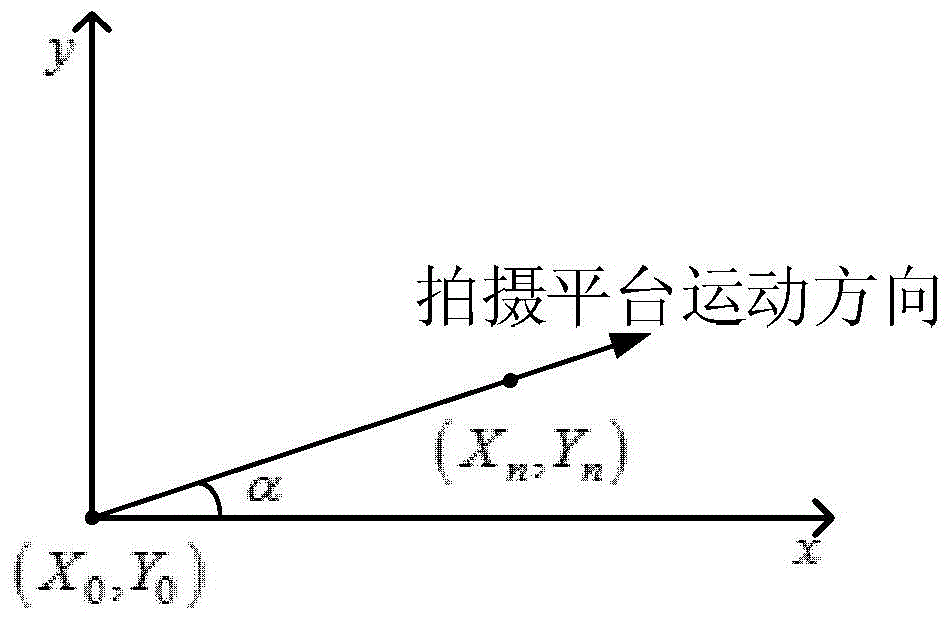
[0074] Step 1. Select the coordinate origin P0(X 0 ,Y 0 ), to establish a plane two-dimensional Cartesian coordinate system, such as figure 2 shown;
[0075] Step 2: Carry out video shooting in the process of a straight line at a constant speed through the platform carrying the video acquisition device (mobile phone), and record the position coordinate information of the frame in the video by processing the obtained video, the position coordinates can be obtained through the shooting platform The motion speed, the sequence number of the frame and the frame rate of the video are calculated, as shown in formula (1):
[0076] X n = X 0 +...
specific Embodiment approach 2
[0079] Embodiment two, the indoor visual positioning method of the Visual Map database based on the video collection of embodiment one, it may further comprise the steps:
[0080] Step 1. Calculate the hash value of the image uploaded by the user to be located through the perceptual hash algorithm;
[0081] Step 2. According to the hash value calculated by the perceptual hash algorithm in step 1, 4 frames of images are searched from the Visual Map database, and the rough matching process is completed;
[0082] Step 3. Calculate the matching points of the 4 frames of rough matching images obtained in step 2 and the image uploaded by the user through the SURF algorithm;
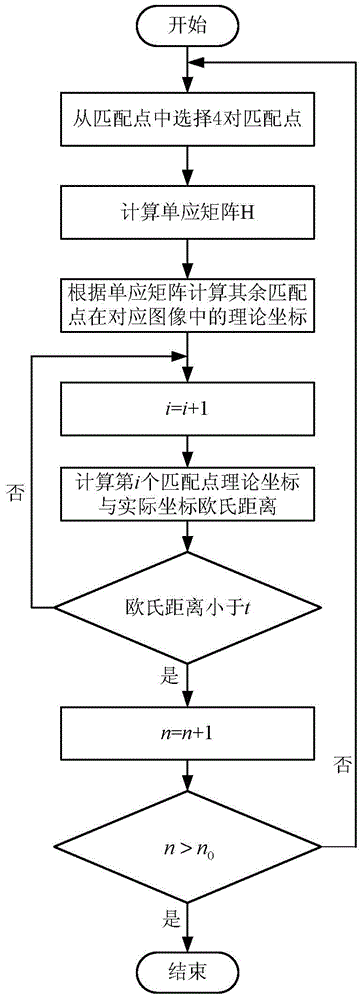
[0083] Step 4, select 8 pairs of matching points from the matching points obtained by each pair of images in step 3 by RANSAC algorithm, and record their coordinates in the corresponding images;
[0084] Step 5. According to the pixel coordinates obtained in Step 4, the user's position coordinates are calculat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com