Cable drive robot device for simulating zero-gravity and low-gravity environment
A low-gravity environment, zero-gravity technology, applied in the simulation device of space navigation conditions, transportation and packaging, space navigation equipment, etc., to achieve the effect of high motion control accuracy, high dynamic characteristics, and large working space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0024] The implementation of the present invention will be described in detail below in conjunction with the drawings and examples.
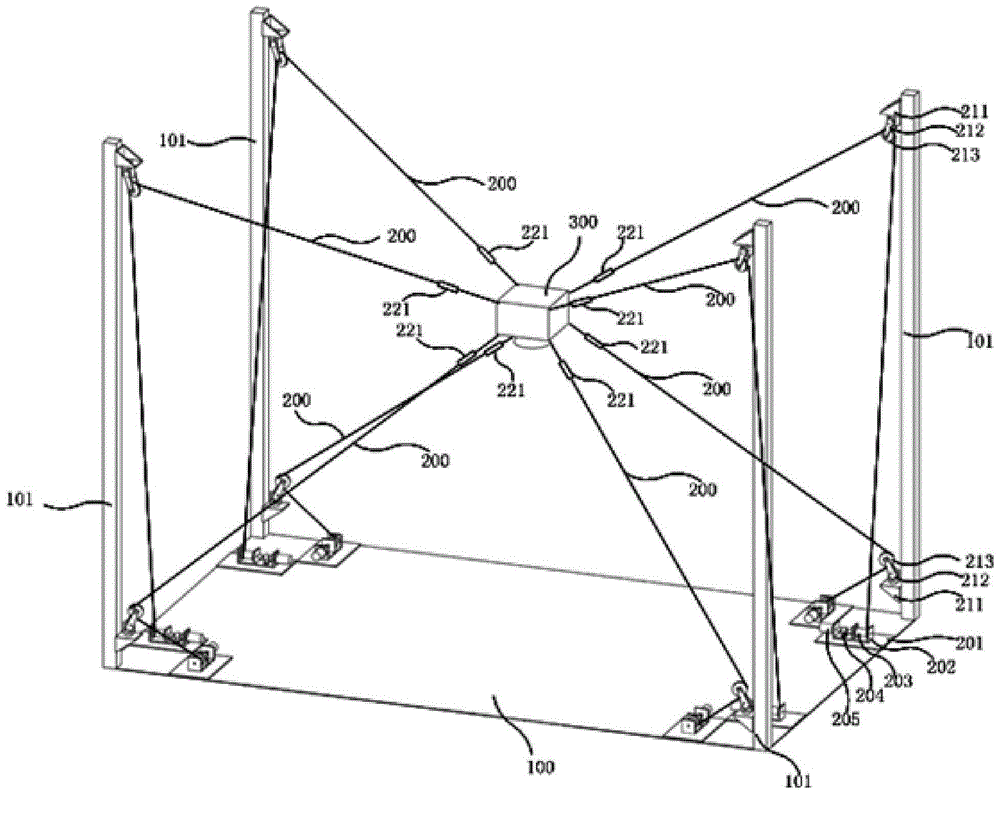
[0025] The invention relates to a cable-driven robot device for simulating zero-gravity and low-gravity environments, such as figure 1 As shown, its specific implementation is as follows: the cable-driven robotic device for simulating zero-gravity and low-gravity environments consists of a basic frame, a rope 200, a rope drive unit, a rope guide, a simulated load platform 300, sensors and a control system, wherein the basic Four columns 101 are installed on the platform 100, and a set of rope guides are respectively installed on the top and bottom of the four columns 101. The rope guides are composed of bogie bracket 211, bogie 212 and pulley 213, and there are eight groups in total; There are eight groups of units, all of which are composed of a mounting base 201, a mounting bracket 202, a roller 203, a motor 205 and related connectors; one end...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com