Blank stacking robot system
A robot system and robot technology, which is applied in the field of stacking robots, can solve the problems of limiting the output of stacking robots, increasing user investment costs, and increasing the range of arms, achieving increased grabbing weight, simple structure, and reduced range of motion Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
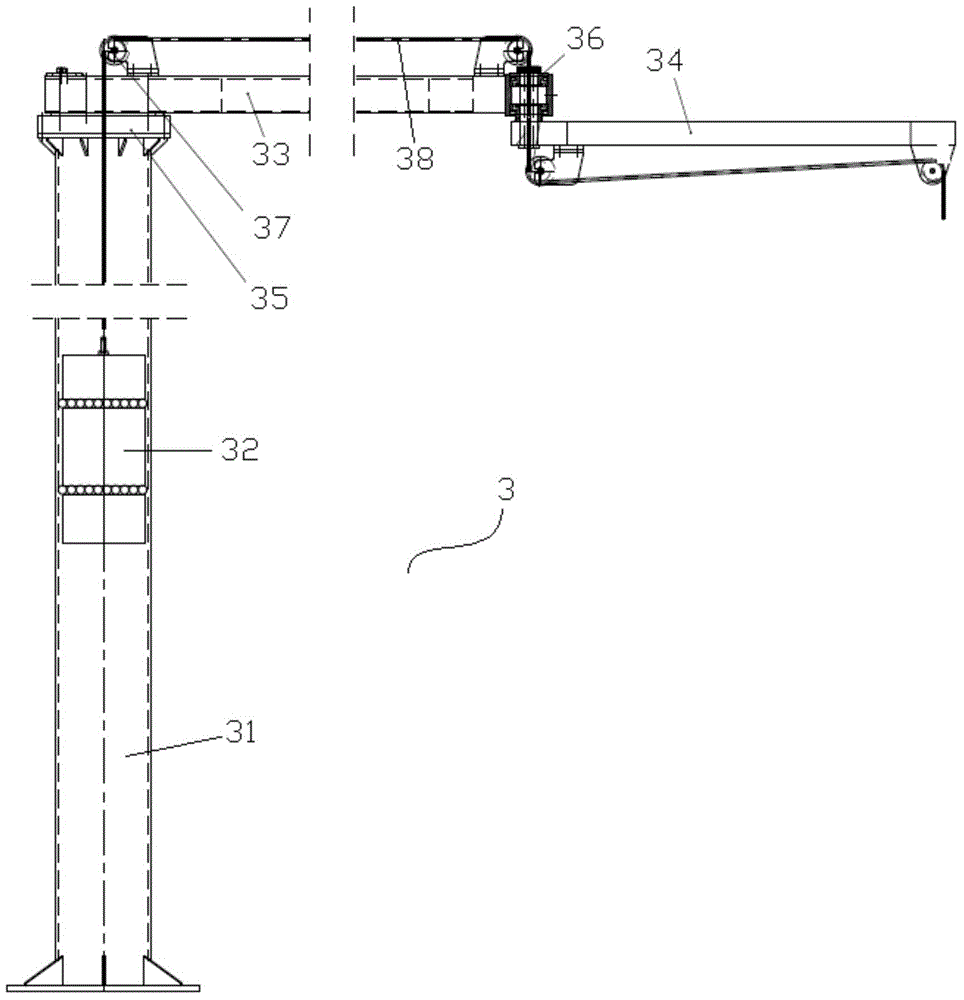
[0031] The stacking robot system of the present invention increases the grabbing weight of the stacking robot by adding a counterweight device and improving the machine base, so that the stacking robot can be applied to a production line with a large output. The present invention will be described in detail below in conjunction with specific structures.
[0032] Such as figure 1 As shown, the code blank robot system of the present invention includes: a machine base 1; a code blank robot and a counterweight device 3 installed above the machine base 1; wherein, the counterweight device 3 is connected with the code blank robot to increase the weight of the code blank robot. Grab the weight.
[0033] Among them, the stacking robot includes: a brick grasping device 2 for grabbing bricks and stacking them; a mechanical arm 4 connected to the brick grasping device 2; a servo drive device connected to the brick grasping device 2 and the mechanical arm 4 respectively. The electrical ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com