Air radio monitoring system based on ground remote control of multi-rotor robot
A technology for radio monitoring and robotics, applied in radio wave direction/deviation determination systems, direction finders using radio waves, attitude control, etc., can solve the problems of high storage and maintenance costs, low safety, and high manufacturing costs, and achieve Save training costs, reduce investment costs, and reduce manufacturing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
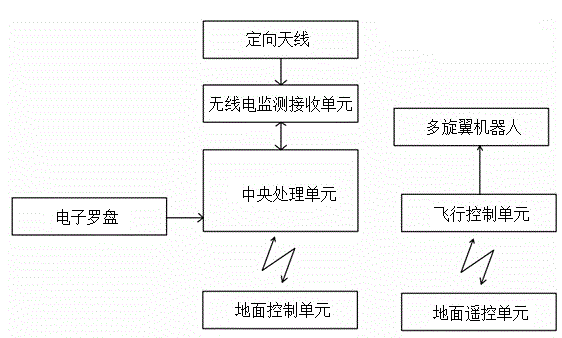
[0059] An aerial radio monitoring system based on ground remote control of a multi-rotor robot, including:
[0060] Multi-rotor robots for vertical lift, air flight, air hovering and self-rotation;
[0061] A flight control unit for controlling the flight of a multi-rotor robot;
[0062] Directional antennas for acquiring radio signals;
[0063] An electronic compass used to obtain the direction pointed by the directional antenna and obtain the azimuth corresponding to the direction in real time;
[0064] a radio monitoring receiving unit for receiving radio signals;
[0065] Central processing unit for controlling radio monitoring receiving unit and electronic compass;
[0066] The ground remote control unit used to control the multi-rotor robot to perform various flight actions;
[0067] A ground control unit for controlling the central processing unit and assigning monitoring tasks to the central processing unit;
[0068] The directional antenna, electronic compass, ra...
Embodiment 2
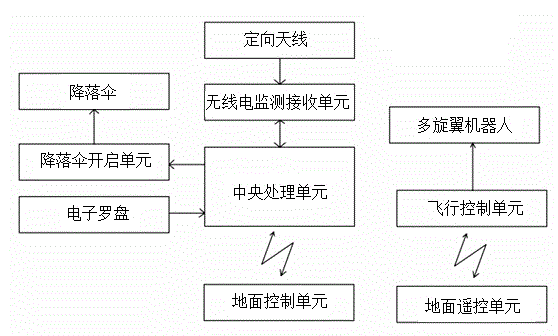
[0070] An aerial radio monitoring system based on ground remote control of a multi-rotor robot, including:
[0071] Multi-rotor robots for vertical lift, air flight, air hovering and self-rotation;
[0072] A flight control unit for controlling the flight of a multi-rotor robot;
[0073] Directional antennas for acquiring radio signals;
[0074] An electronic compass used to obtain the direction pointed by the directional antenna and obtain the azimuth corresponding to the direction in real time;
[0075] a radio monitoring receiving unit for receiving radio signals;
[0076] Central processing unit for controlling radio monitoring receiving unit and electronic compass;
[0077] The ground remote control unit used to control the multi-rotor robot to perform various flight actions;
[0078] A ground control unit for controlling the central processing unit and assigning monitoring tasks to the central processing unit;
[0079] The directional antenna, electronic compass, ra...
Embodiment 3
[0094] An aerial radio monitoring system based on ground remote control of a multi-rotor robot, including:
[0095] Multi-rotor robots for vertical lift, air flight, air hovering and self-rotation;
[0096] A flight control unit for controlling the flight of a multi-rotor robot;
[0097] Directional antennas for acquiring radio signals;
[0098] An electronic compass used to obtain the direction pointed by the directional antenna and obtain the azimuth corresponding to the direction in real time;
[0099] a radio monitoring receiving unit for receiving radio signals;
[0100] Central processing unit for controlling radio monitoring receiving unit and electronic compass;
[0101] The ground remote control unit used to control the multi-rotor robot to perform various flight actions;
[0102] A ground control unit for controlling the central processing unit and assigning monitoring tasks to the central processing unit;
[0103] The directional antenna, electronic compass, ra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com