A Modular Handheld Dual-Operation End-Master Robot
A main robot, hand-held technology, used in manipulators, manufacturing tools, etc., can solve problems such as lack of versatility and flexibility, difficulty in teaching or remote control, and inability to change the configuration, and achieves low cost of use and maintenance, good versatility. Performance and flexibility, easy to build and disassemble
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
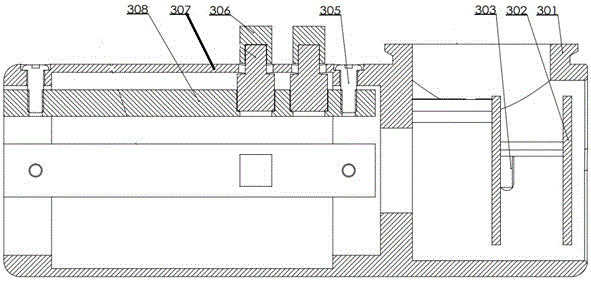
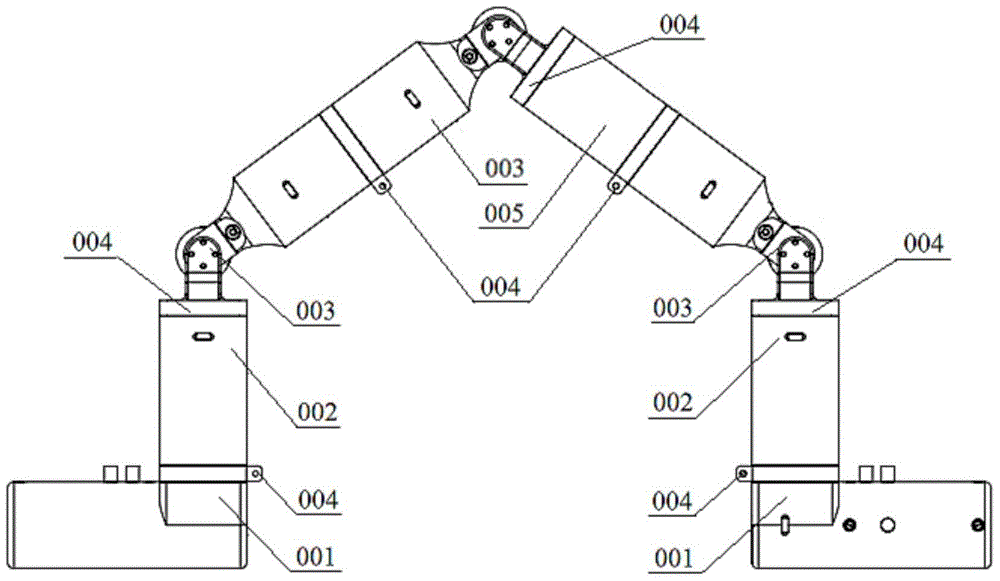
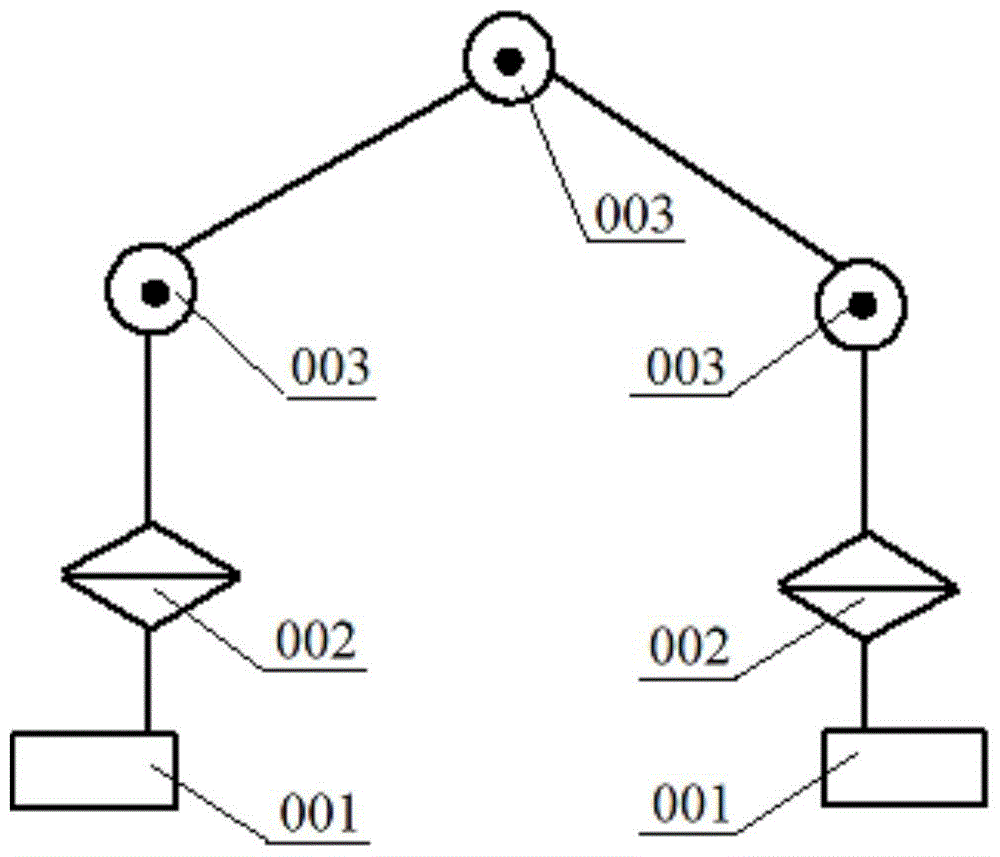
[0026] The appearance diagram and schematic diagram of the mechanism of the modular handheld dual-operation terminal main robot of the present invention are as follows: figure 1 and figure 2 As shown, there are seven modules including two handle modules 001, three swing joint modules 003, and two swing joint modules 002. Each module is connected in series with snap rings. The connection sequence is: first handle module, The first swing joint module, the first swing joint module, the second swing joint module, the third swing joint module, the second swing joint module, the second handle module, the second swing joint module and the third swing joint module A joint sleeve 005 is added between the joint modules, so that the structures at both ends of the robot are symmetrical with respect to the joint rotation axis of the second swing joint module. The joint axis of module 002 is vertical, and the two handle modules 001 are respectively installed at both ends of the robot to f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com