Electromyographic signal gait recognition method based on particle swarm optimization and support vector machine
A technology of support vector machine and particle swarm optimization, applied in the field of pattern recognition, it can solve problems such as data size limitation, difficulty in finding optimal parameters accurately, and time-consuming optimization method.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach
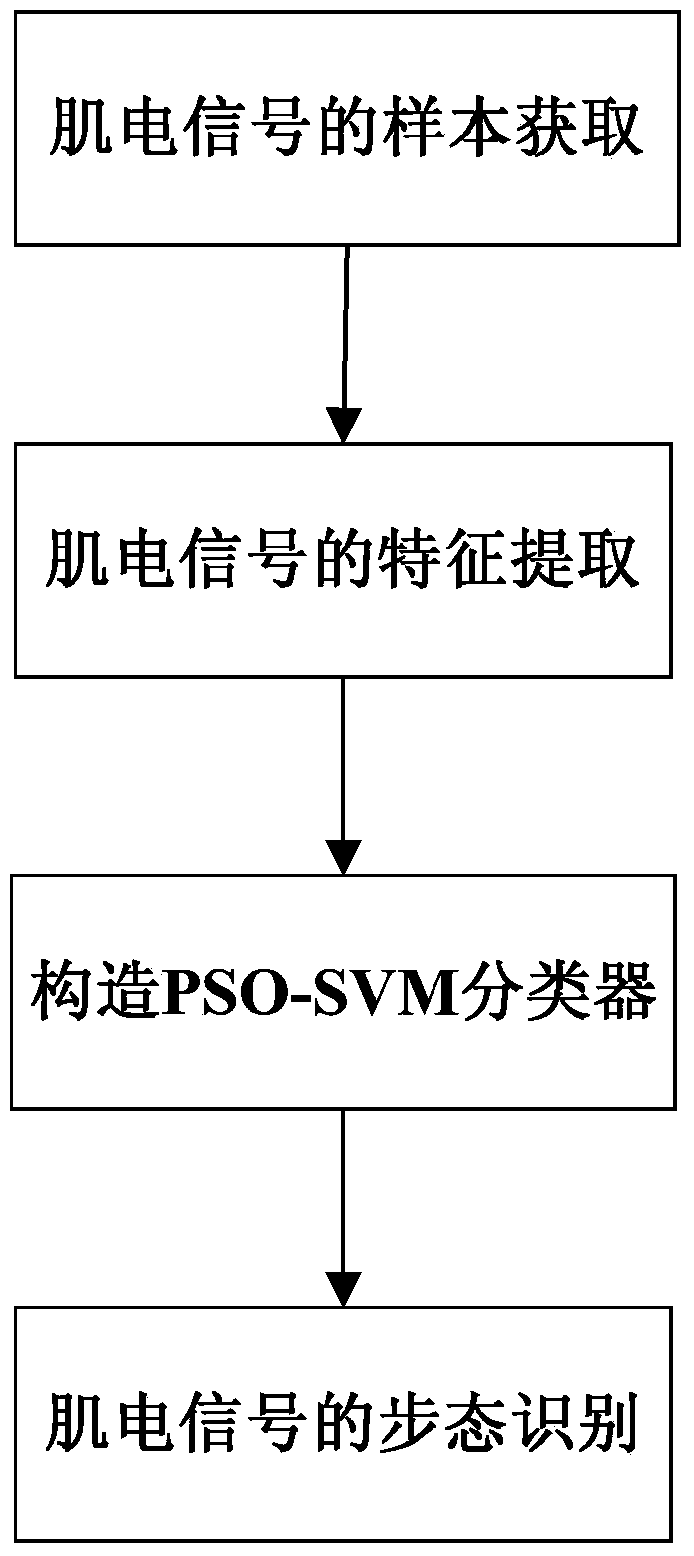
[0064] Step three, constructing a PSO-SVM classifier. Use PSO to optimize the parameters of SVM, and obtain a set of penalty parameters C and kernel function parameters g that minimize the SVM error. The optimization process is as follows: Figure 4 . The EMG feature sample set extracted in step 2 is used to train and test the optimized SVM classifier for recognition and classification. The specific implementation is as follows:
[0065] First, set the initial parameters of the PSO algorithm. Referring to the research of PSO algorithm by Pan Feng et al., set the inertia weight w=0.8, satisfy the range of w∈[0.2,1], and the learning factor c 1 =1.5,c 2 =1.7, conforming to the value range of [0,4]. The particle size, that is, the number of populations, is set to 20, and the maximum number of iterations maxgen is initially set to 100, which is used as the iteration termination condition of the PSO algorithm.
[0066] Such as Figure 5 , when PSO satisfies the iteration ter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com