Input shaper closed-loop control method based on chaotic particle swarm optimization algorithm
A chaotic particle swarm and particle swarm optimization technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of drive shaft impact, mutual influence between parameters, and influence on the service life of printing presses
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
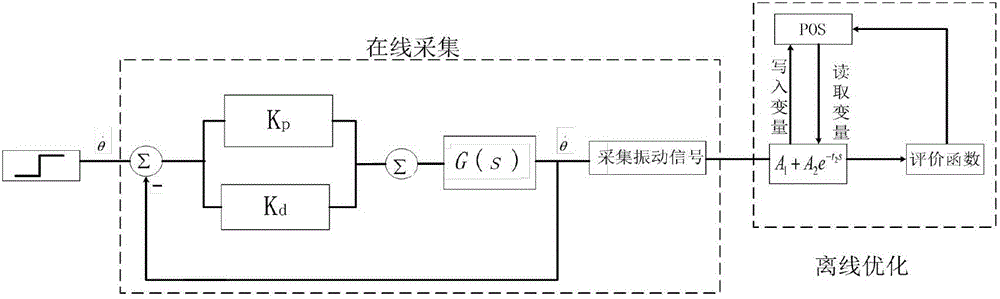
[0041] The present invention is a kind of closed-loop control method of input shaper based on chaotic particle swarm optimization algorithm, referring to figure 1, in the online situation, after the input signal enters the mechanical system, the velocity motion curve of the output shaft is collected, and then the parameters of the input shaper are optimized offline by using the chaotic particle swarm optimization algorithm according to the collection curve, and then the optimized input shaper is used to control the movement of the PD mechanical system, In this way, the frequency point resonating with the actuator in the starting signal can be filtered out, and the torsional vibration of the system is greatly suppressed while realizing a fast vibration-free response of the system.
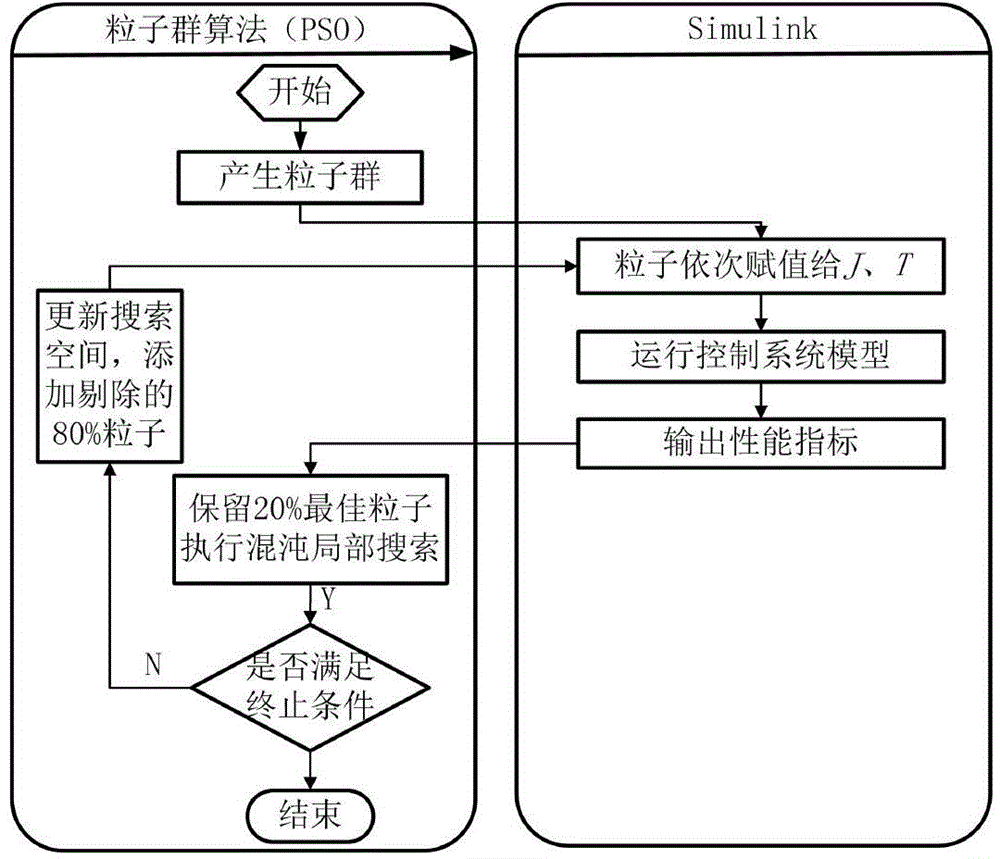
[0042] The offline optimization method of chaotic particle swarm is as follows: figure 2 As shown, the bridge between the chaotic particle swarm optimization algorithm and the simulink model is the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com