Doubleleg strength test experimental platform of foot type walking robot
A technology for walking robots and testing experiments, which is applied in the direction of two-dimensional position/channel control, etc., can solve the problem of lack of performance testing of legs of footed robots, and achieve low-cost effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
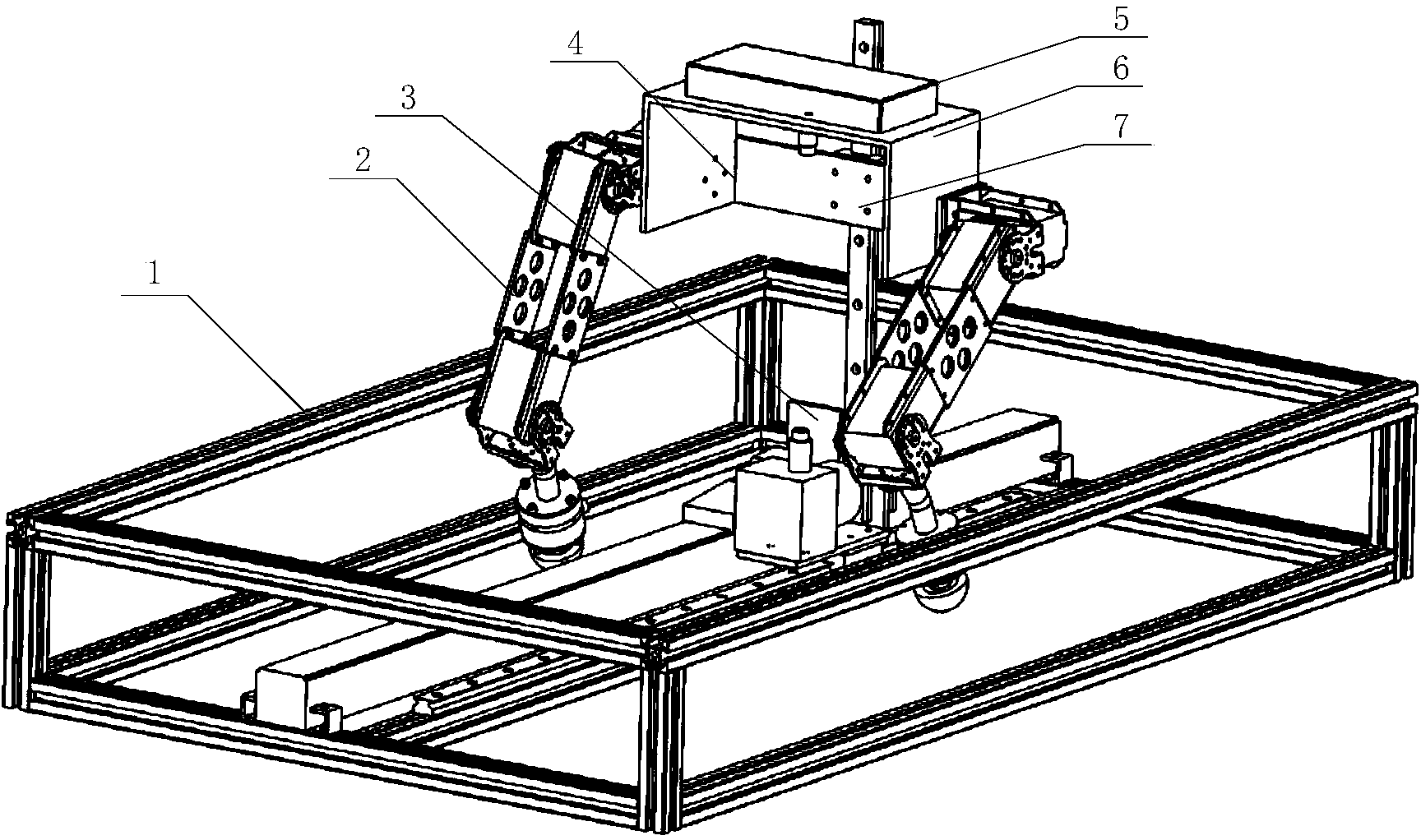
[0017] Such as figure 1 As shown, the present invention consists of a robot double-leg test bench 1, a robot single-leg assembly 2, a robot double-leg experimental mechanism 3, a robot double-leg connector 4 and a robot double-leg controller 5. Among them, the robot double-leg test bench is built by standard industrial aluminum alloy profiles, and the double-leg connector 4 is composed of a vertical U-shaped resin plate 6 and a horizontal U-shaped resin plate 7, on which a robot double-leg controller 5 is installed.
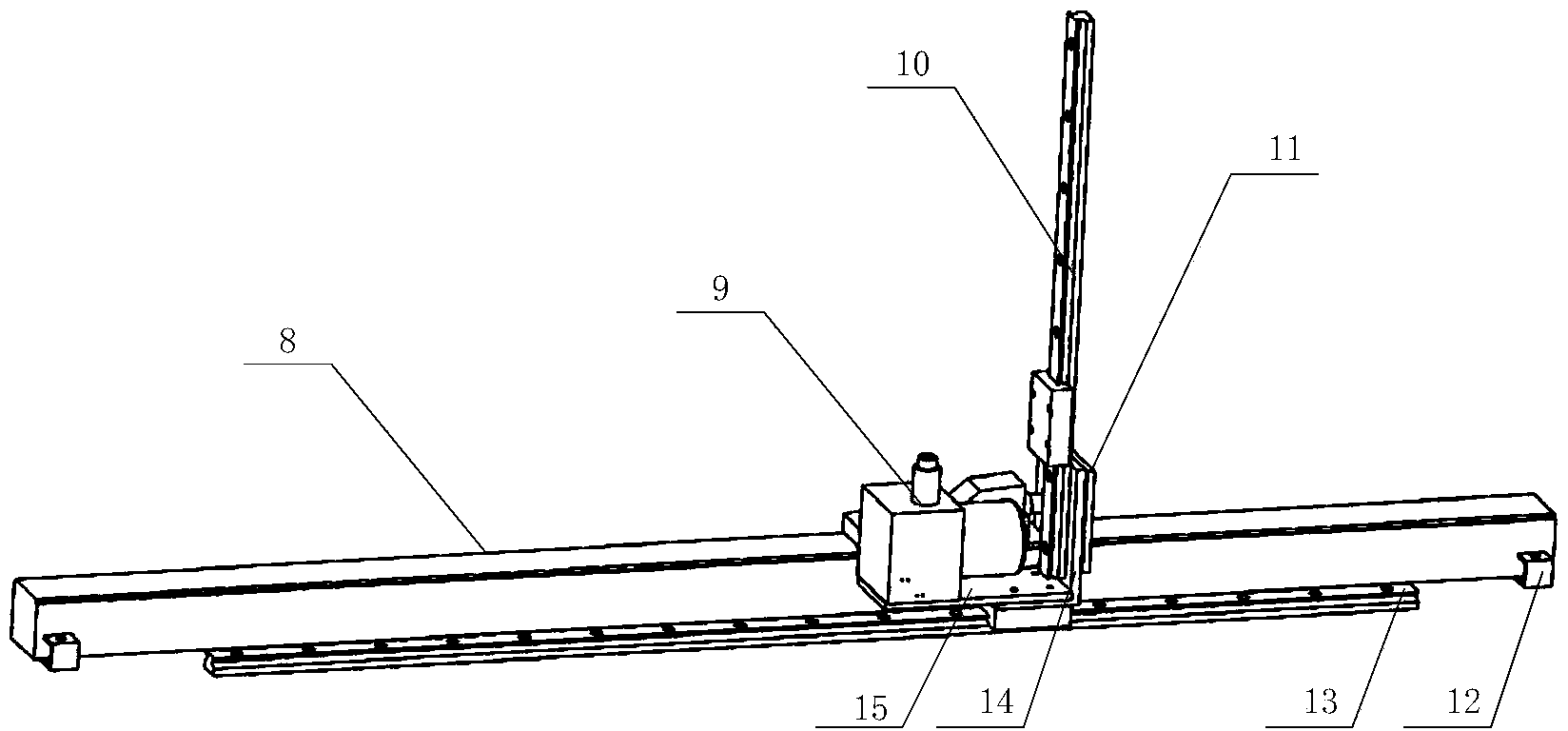
[0018] figure 2 The implementation example shown is the robot double-leg experimental mechanism, and this experimental mechanism is made up of horizontal displacement sensor 8, vertical displacement sensor 9, vertical guide rail 10, horizontal displacement sensor sliding connector 11, horizontal displacement sensor fixed connector 12, horizontal guide rail 13. Composed of L-shaped angle steel 14 and rectangular resin plate 15, wherein the slider on the vertical...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com