


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Satellite gyrounit fault diagnosis method based on principal component analysis algorithm
A technology of gyroscope components and principal component analysis, which is applied in calculation, special data processing applications, measuring devices, etc., to achieve good fault diagnosis, improve accuracy, and avoid false alarms.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
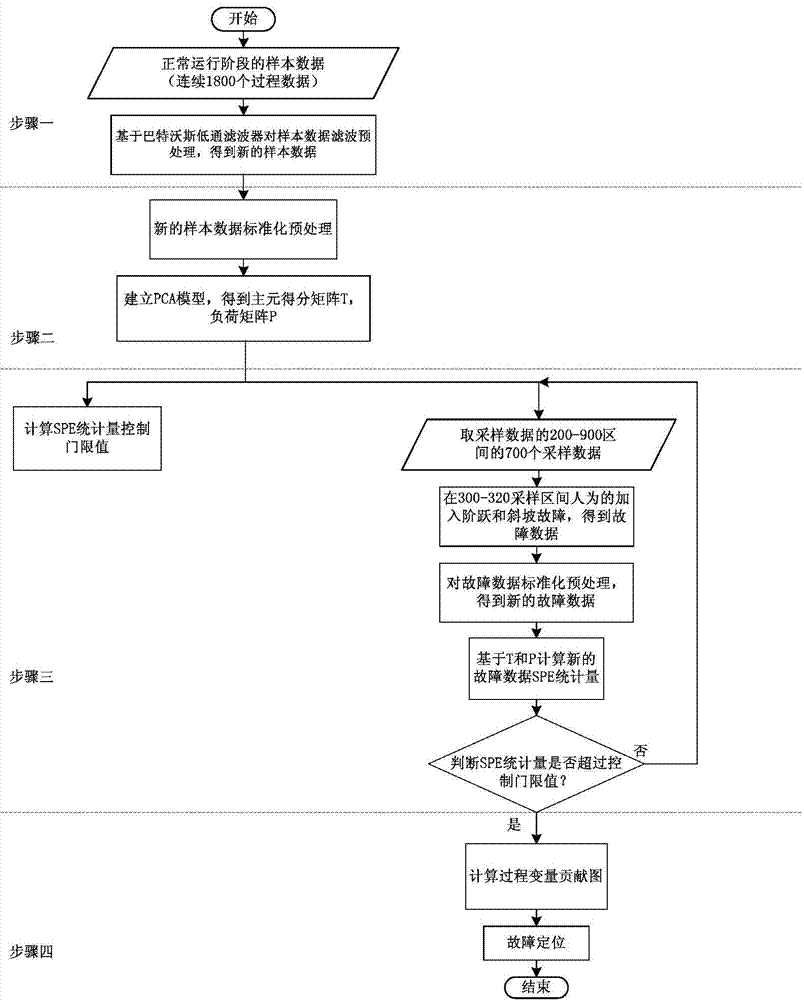
[0026] Specific implementation mode 1: The satellite gyroscope component fault diagnosis method based on principal component analysis algorithm of this embodiment is implemented in the following steps:
[0027] Step 1: Filter and preprocess the output angular velocity data Xp of the satellite gyro component based on the Butterworth low-pass filter;
[0028] Step 2: Use the preprocessed satellite gyro component output angular velocity data X to construct a PCA mathematical model;
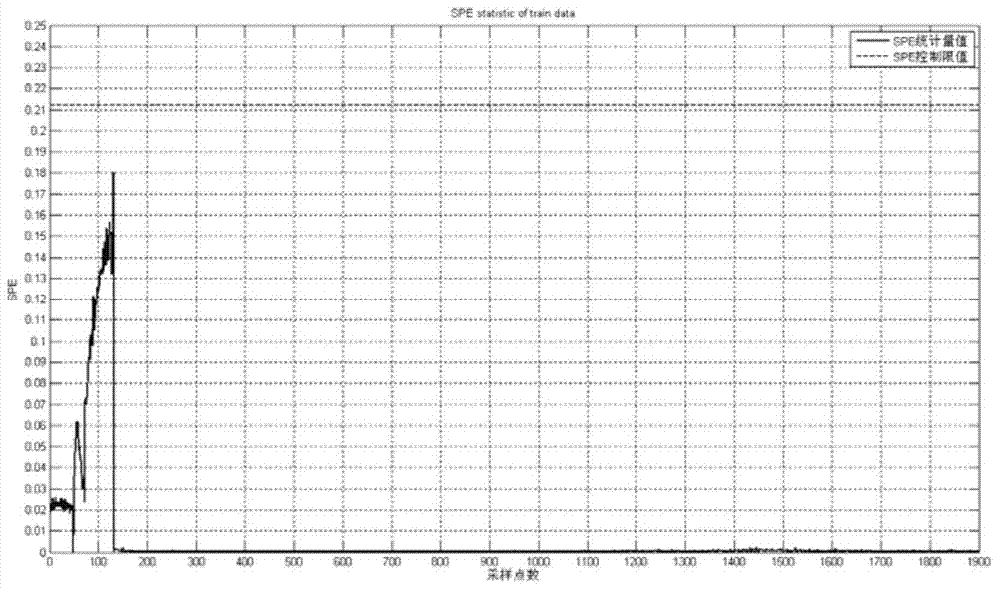
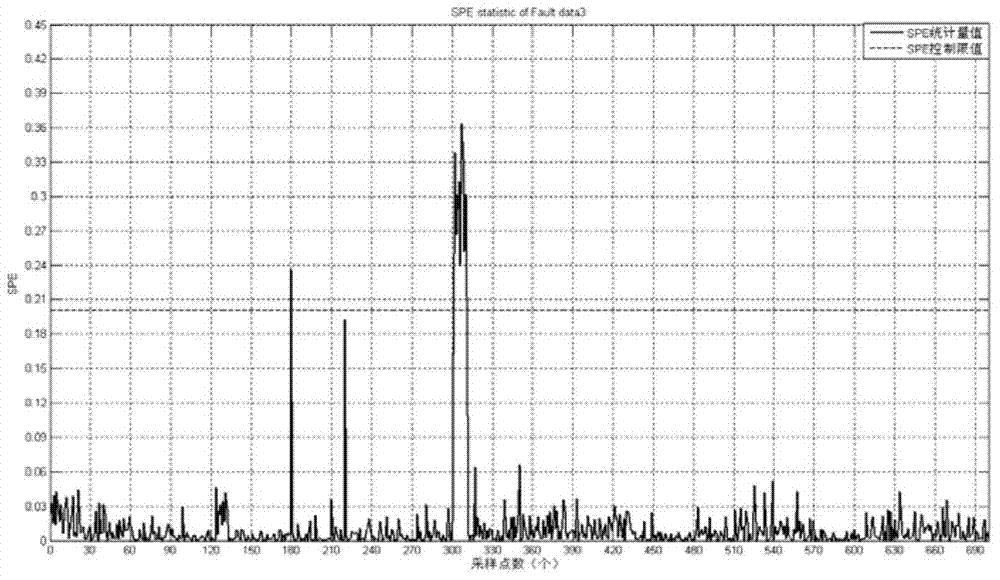
[0029] Step 3: Use the PCA mathematical model parameters obtained in step 2, and use the square prediction error SPE statistic to detect the process data in the residual subspace;
[0030] Step 4: After detecting the fault, diagnose the fault location according to the process variable contribution graph.
specific Embodiment approach 2
[0031] The second embodiment is different from the first embodiment: the first step is based on the output angular velocity data X of the satellite gyro component based on the Butterworth low-pass filter. p The filtering preprocessing is specifically:
[0032] 1. Model definition
[0033] The model of rate gyroscope is expressed as:
[0034] w out =w in +D+N
[0035] Where w out Is the measurement output of the rate gyroscope, w in Is the actual angular velocity of the satellite, D is the random drift, and N is the measurement noise;
[0036] Butterworth low-pass filter amplitude square function|H a (jΩ)| 2 defined as
[0037] | H a ( jΩ ) | 2 = 1 1 + ( Ω Ω c ) 2 N
[0038] Where N is a positive integer representing the order of the filter, Ω represents the analog corner frequency, Ω c It is called the cut-off frequency, j represents the imaginary unit, a represents the analog filter, and H(·) represents the analog filter...
specific Embodiment approach 3
[0053] Specific embodiment three: This embodiment is different from specific embodiment one or two in:
[0054] In the second step, using the preprocessed output angular velocity data X of the satellite gyro component to construct the PCA mathematical model is specifically as follows:
[0055] 1. First, use the following method to standardize the angular velocity data X after filtering and preprocessing:
[0056] X 1 ij = X ij - X ‾ ( j ) s ( j ) , 1,2 , . . . n , j = 1,2 . . . m
[0057] Where X∈R n×m , R represents a real number, n is the number of sampling points of the gyroscope output data, that is, the observation data sample, m is the number of process variables at each sampling point, X(j) represents the jth column of X, Represents the mean value of X(j), s(j) represents the standard deviation of X(j);
[0058] Record the standardized sample data array as X1;
[0059] 2. Find the covariance ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com