Real-time tracking device and method for space track
A real-time tracking and trajectory technology, applied in the direction of measuring devices, instruments, surveying and navigation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
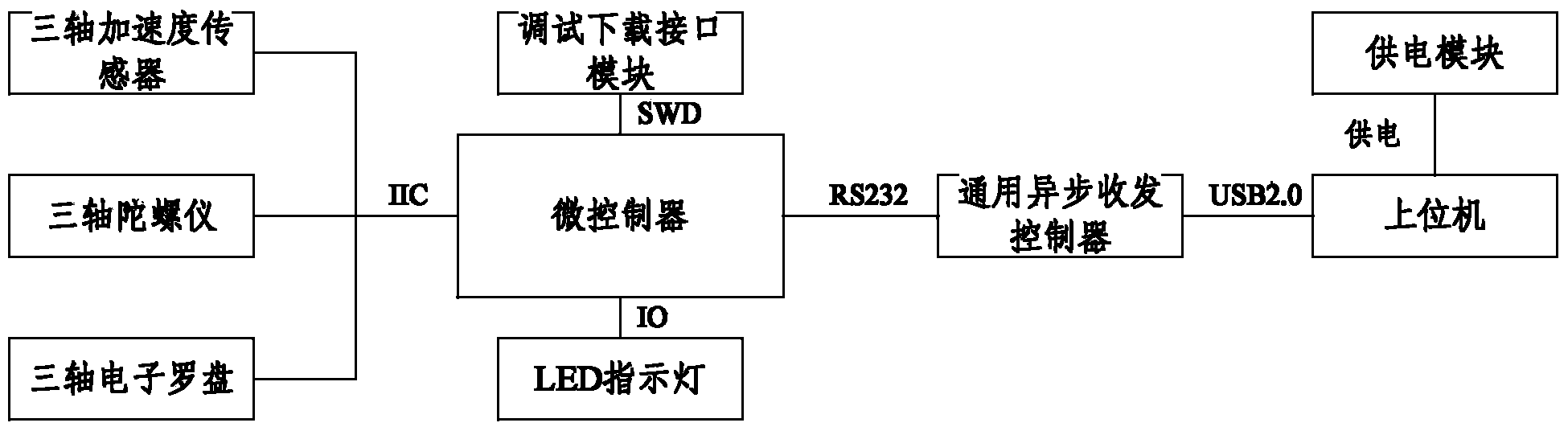
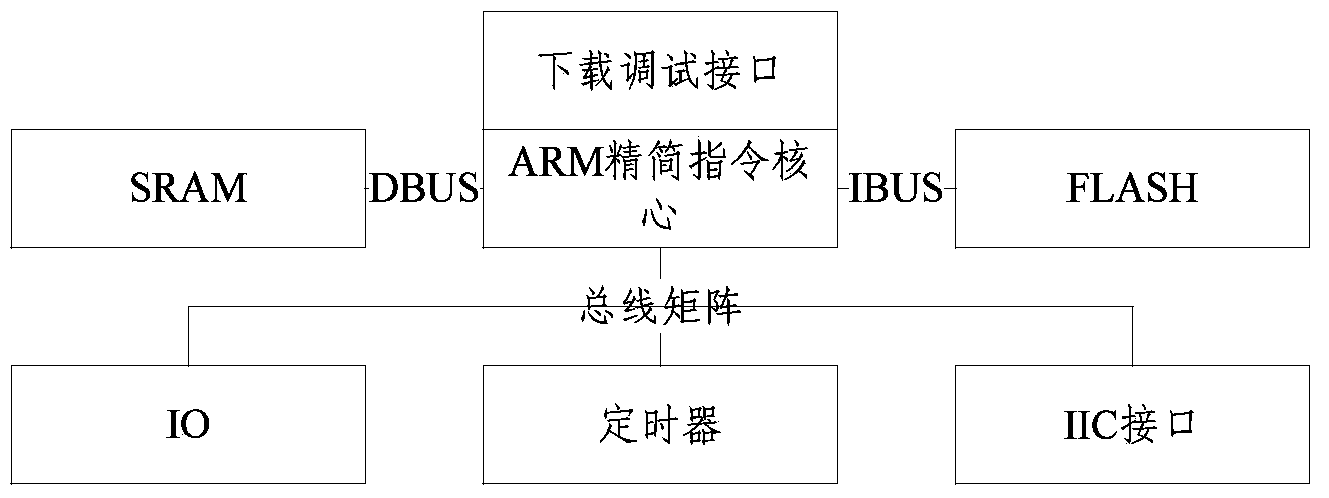
[0077] like figure 1 As shown, the embodiment of the present invention provides a space trajectory real-time tracking device, the device includes: a sensor, a microcontroller, a universal asynchronous transceiver controller,
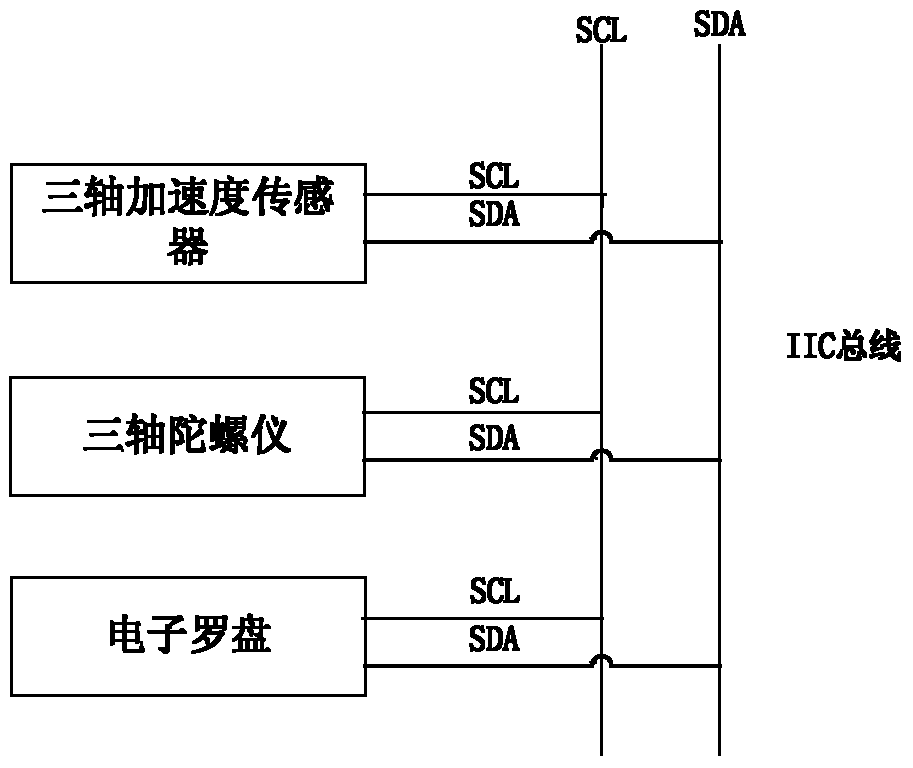
[0078] like image 3 As shown, the sensor includes a three-axis acceleration sensor, a three-axis gyroscope and a three-axis electronic compass, and the three-axis acceleration sensor is used to collect accelerations on three mutually perpendicular axes, and the three-axis gyroscope is used for Acquiring angular velocities on three mutually perpendicular axes, the three-axis electronic compass is used to collect attitude angles on three mutually perpendicular axes, and the sensor sends sensing data to a microcontroller through an IIC interface;
[0079] The microcontroller is used to receive and process the sensing data sent by the sensor, and send a control command to the sensor through the IIC bus; at the same time, send the processed sensing data to ...
Embodiment 2
[0098] like Figure 12 As shown, the embodiment of the present invention provides a method for real-time tracking of space trajectory, the method includes steps:
[0099] S1. The device is initialized, the microcontroller starts timing, and after the predetermined delay time, the microcontroller receives the sensor data collected by the three-axis acceleration sensor, three-axis gyroscope and three-axis electronic compass;
[0100] S2. The microcontroller processes the sensor data to obtain the initial attitude angle of the device, and determines the initial rotation quaternion (q 0 ,q 1 ,q 2 ,q 3 );
[0101] S3. Update the initial rotation quaternion according to the angular velocity data transmitted by the three-axis gyroscope to obtain a rotation matrix, and decompose the three-axis acceleration data transmitted by the three-axis acceleration sensor into a navigation coordinate system through the rotation matrix ;
[0102] S4. Integrating the three-axis acceleration i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com