Portable target tracking method and system based on quadcopter
A quadcopter and target tracking technology, applied in the field of portable target tracking methods and systems, can solve the problems that affect the accuracy and efficiency of target detection and tracking, the large amount of calculation of detection and tracking algorithms, and the low running rate of TLD algorithms. Accurate target automatic search and tracking, automatic target search and tracking, reducing size and weight effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The following further describes the present invention with reference to the accompanying drawings of the specification and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
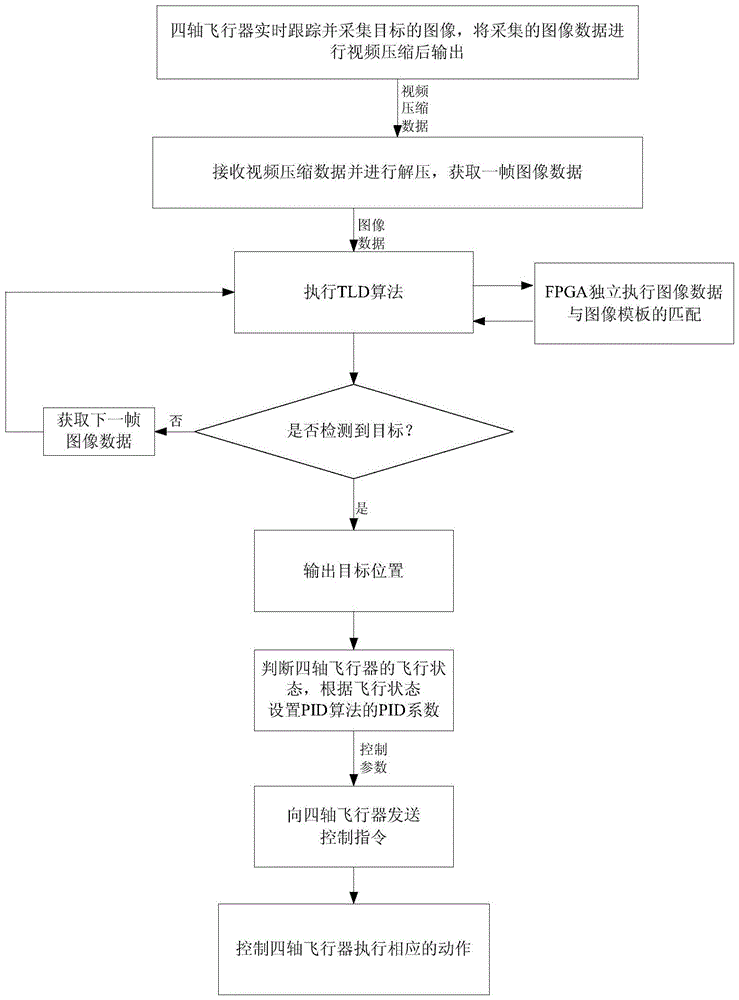
[0047] Such as figure 2 As shown, the portable target tracking method based on the quadcopter in this embodiment includes the following steps:
[0048] (1) Quadrocopter 2 tracks and collects images of target 1 in real time, and compresses the collected image data for video output;
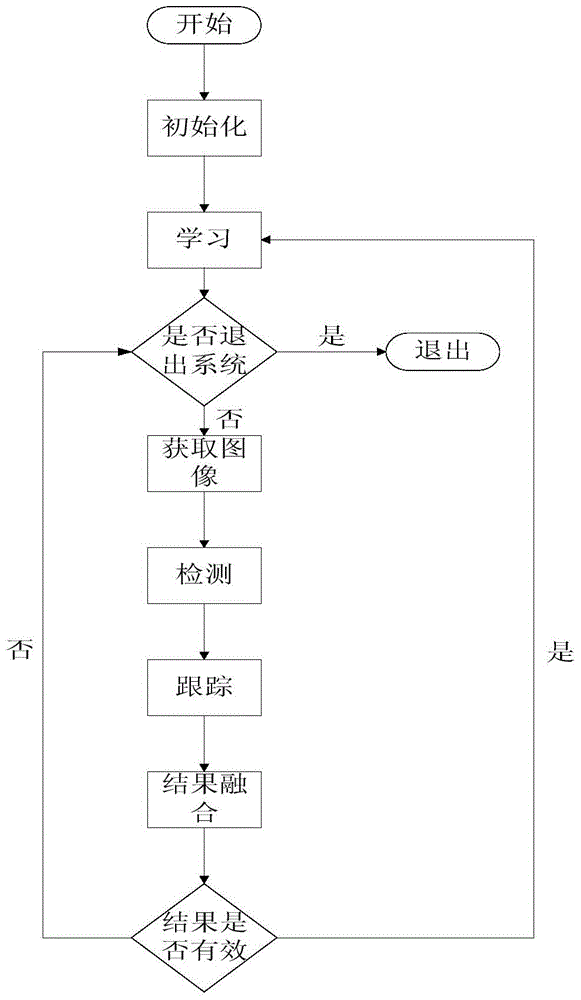
[0049] (2) Receive video compression data and decompress it, use TLD algorithm to detect and track target 1 according to the decompressed image data, and use FPGA to independently perform the matching between the decompressed image data and the image template; when target 1 is detected, output The detected target position;
[0050] (3) The PID algorithm is used to calculate the control parameters according to the detected target position, and the PID coefficients in the P...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com