Rotor unmanned aircraft independent take-off and landing system based on three-layer triangle multi-color landing ground
A technology of unmanned rotor and landing pad, which is applied in the direction of three-dimensional position/channel control, etc., can solve the problems of vision system navigation range limitation, loss of landing pad information, blurred landing pad information, etc., and achieve simplified image processing algorithm, light weight, small size effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
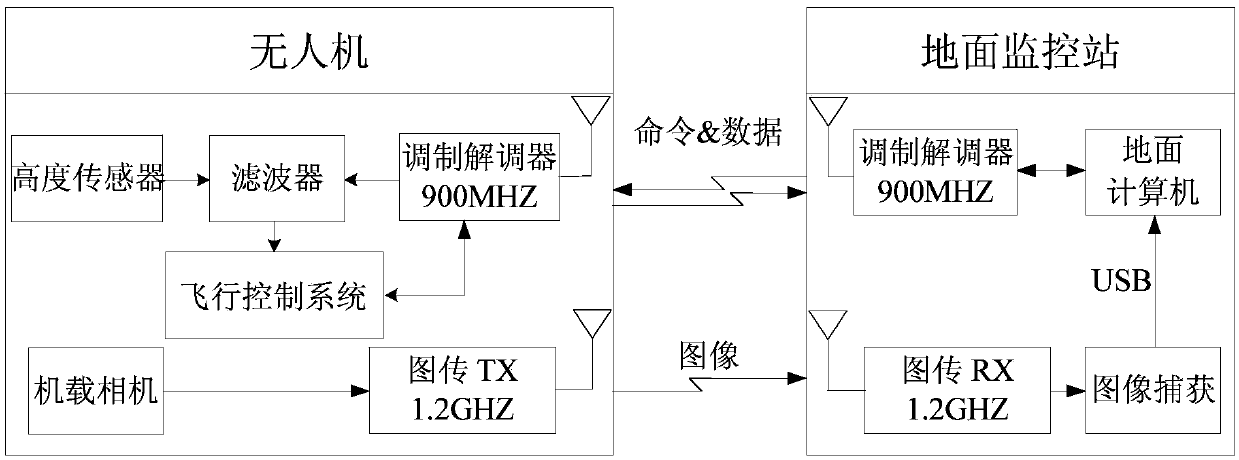
[0024] Such as figure 1 As shown, the present invention mainly includes a small rotor UAV (1), an airborne sensor (2), an onboard data processing unit (3), a flight control system (4), an airborne camera (5), and a ground landing pad (6 ), wireless image transmission module (7), wireless data transmission module (8) and ground monitoring station (9); airborne sensors (2), data processing unit (3), and flight control system (4) are loaded on unmanned On the machine (1), the ground monitoring station (9) is composed of a vision processing unit (10) and a display terminal (11).
[0025] The small rotor UAV (1) is the carrier of the airborne sensor (2), data processing unit (3) and flight control system (4), and it is the research subject of this autonomous take-off and landing system;
[0026] Airborne sensors (2) are mainly composed of sensors that are small in size and light in weight and meet the load requirements of micro-miniature UAVs, such as inertial measurement unit (IM...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com