Underwater vehicle three-dimensional route planning method based on cuckoo search algorithm
A technology of cuckoo search and underwater submersible, which is applied in the field of three-dimensional path planning of underwater submersibles based on cuckoo search algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in detail below in conjunction with the accompanying drawings.
[0040] The invention discloses a three-dimensional path planning method for an underwater submersible based on a cuckoo search algorithm, which mainly includes the following steps:
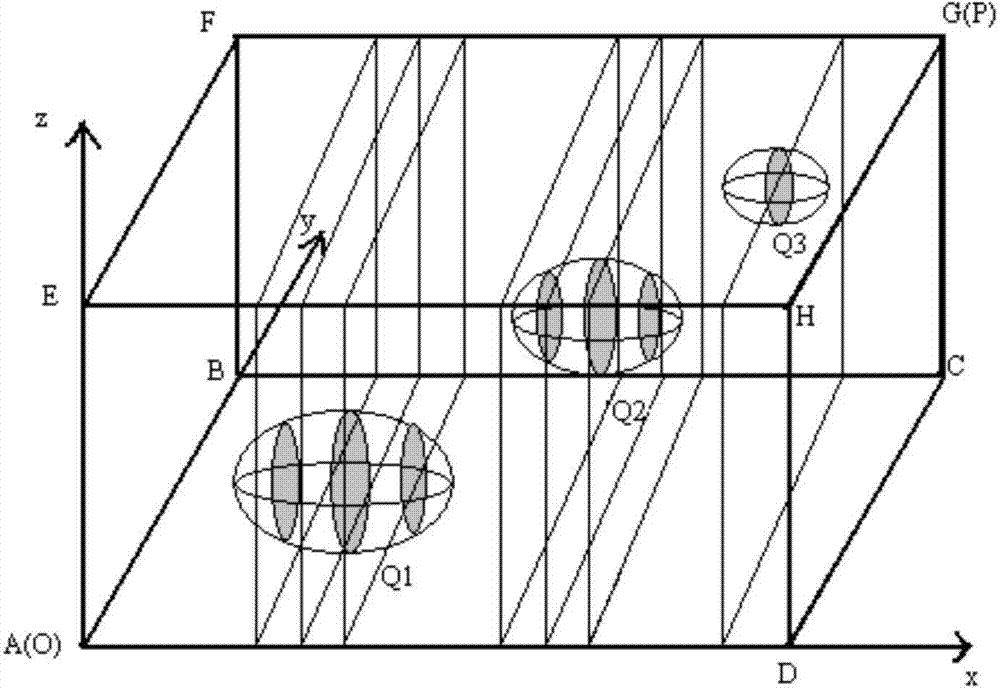
[0041] Step 1: Model the 3D path planning problem of the underwater vehicle. Environment modeling for 3D path planning of underwater submersible and determination of fitness function for evaluating paths.
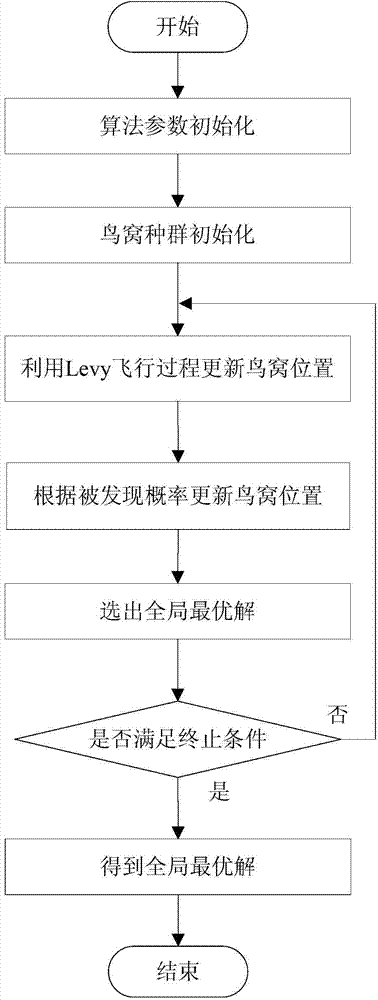
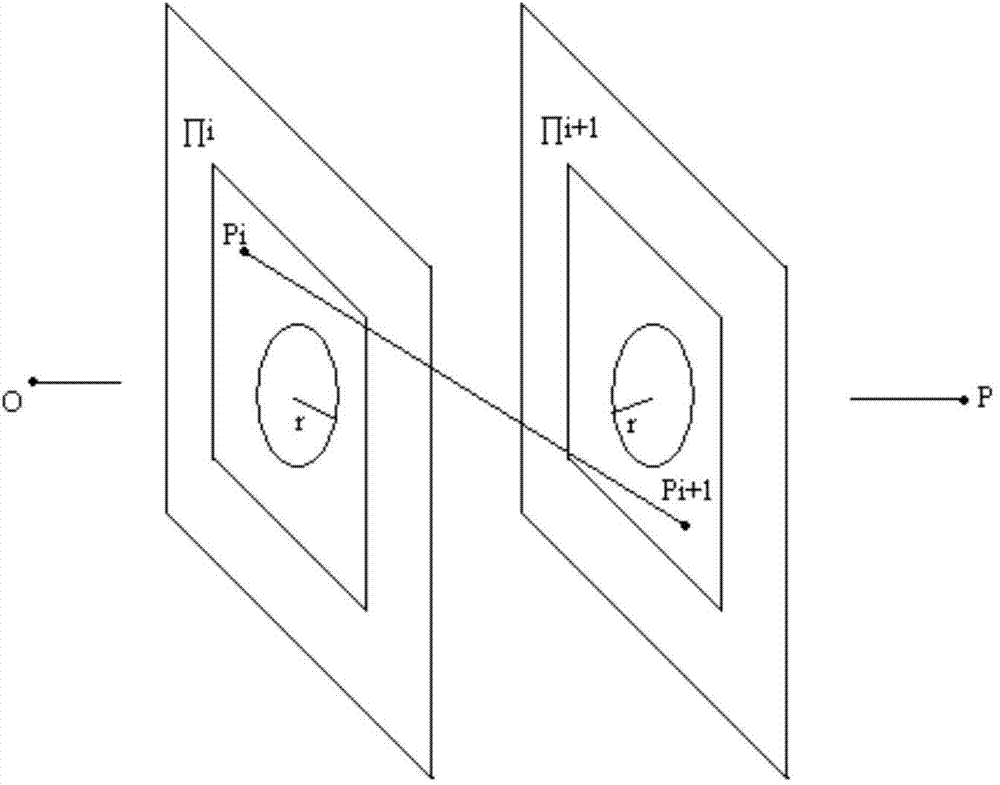
[0042] Step 2: Initialize the cuckoo search algorithm. Initialize the algorithm parameters and the position of the bird's nest, segment the space model, check whether the position of the bird's nest encounters obstacles, and select the initial global optimal position.
[0043] Step 3: Update the location of the bird's nest. First, use the Levy flight process to update the bird's nest position, compare the bird's nest position obtained in step 2, and take a better position; then dis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com