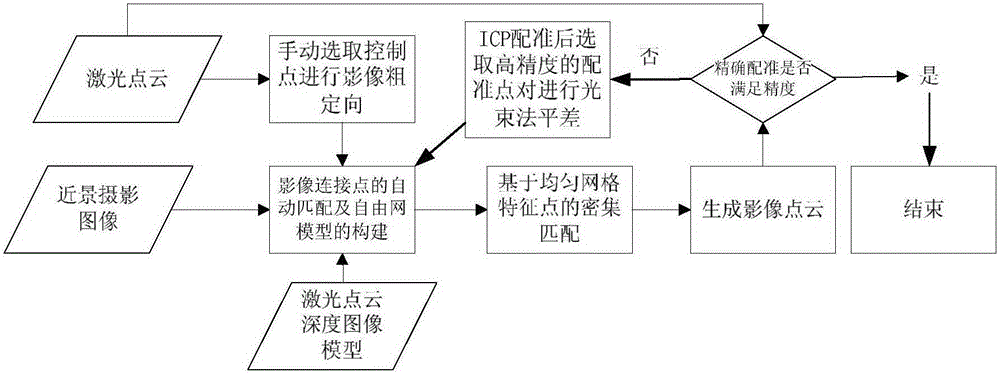
A high-precision registration method for terrestrial lidar and close-range photogrammetry data
A technology of ground laser radar and close-range photography, which is applied in the direction of measuring devices, image data processing, radio wave measurement systems, etc., can solve the problems of incompatible photogrammetry data processing methods, inability to register image point clouds, and low degree of automation. Achieve the effects of improving work efficiency, improving accuracy and efficiency, and narrowing the matching range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
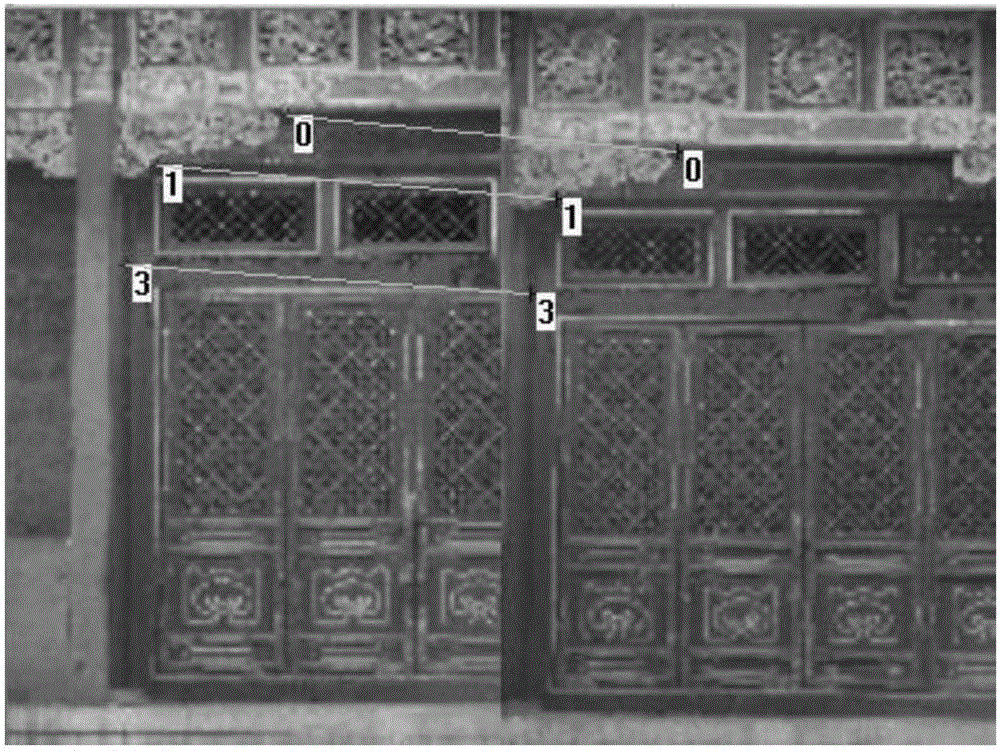
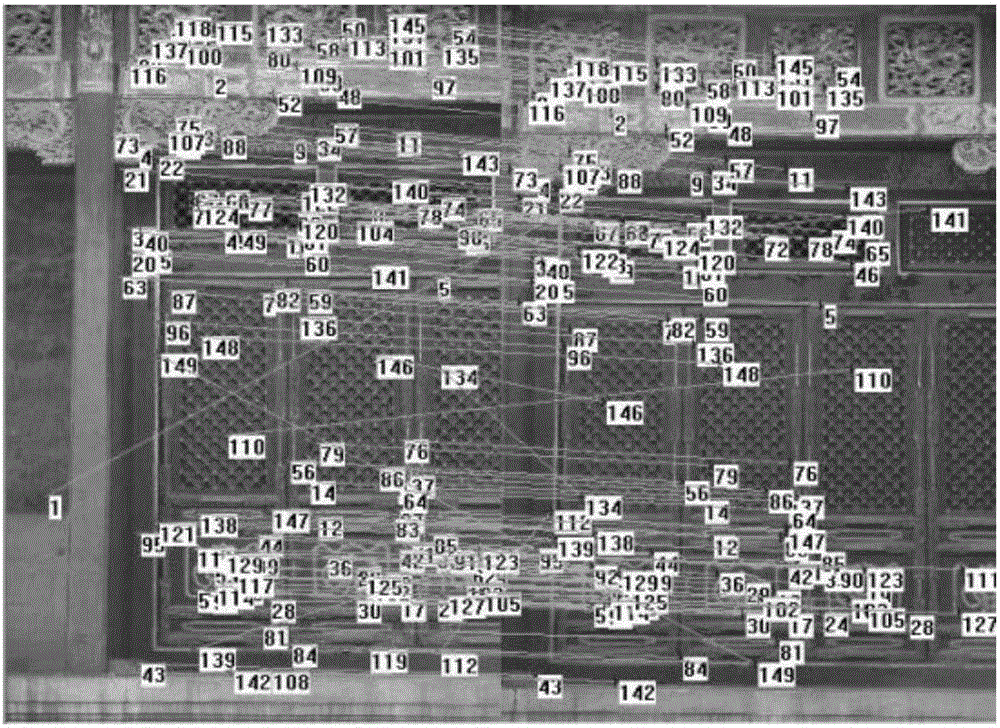
[0050] Terrestrial lidar obtains the three-dimensional information of the scanned object by scanning, and performs geometric reconstruction. In order to complete the texture reconstruction, the object needs to be photographed, and the three-dimensional texture reconstruction is carried out through the registration of the two kinds of data. Due to the difference in resolution between a single image and a point cloud, there will be a texture seam between two adjacent images during texture reconstruction. Therefore, this invention studies the laser radar scanning point cloud and close-range photogrammetry images. , using the relative orientation of high overlapping images to eliminate texture seams between adjacent images, and using high-precision registration between image poin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com