A method for implementing a high-order disturbance observer in embedded motion control
A technology of disturbance observer and implementation method, which is applied in the direction of control using feedback, can solve the problem of long program running time, achieve the effects of shortening running time, ensuring calculation accuracy, and improving response speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The embodiments of the present invention will be described in detail below, and this embodiment is carried out on the premise of the technical solution of the present invention.
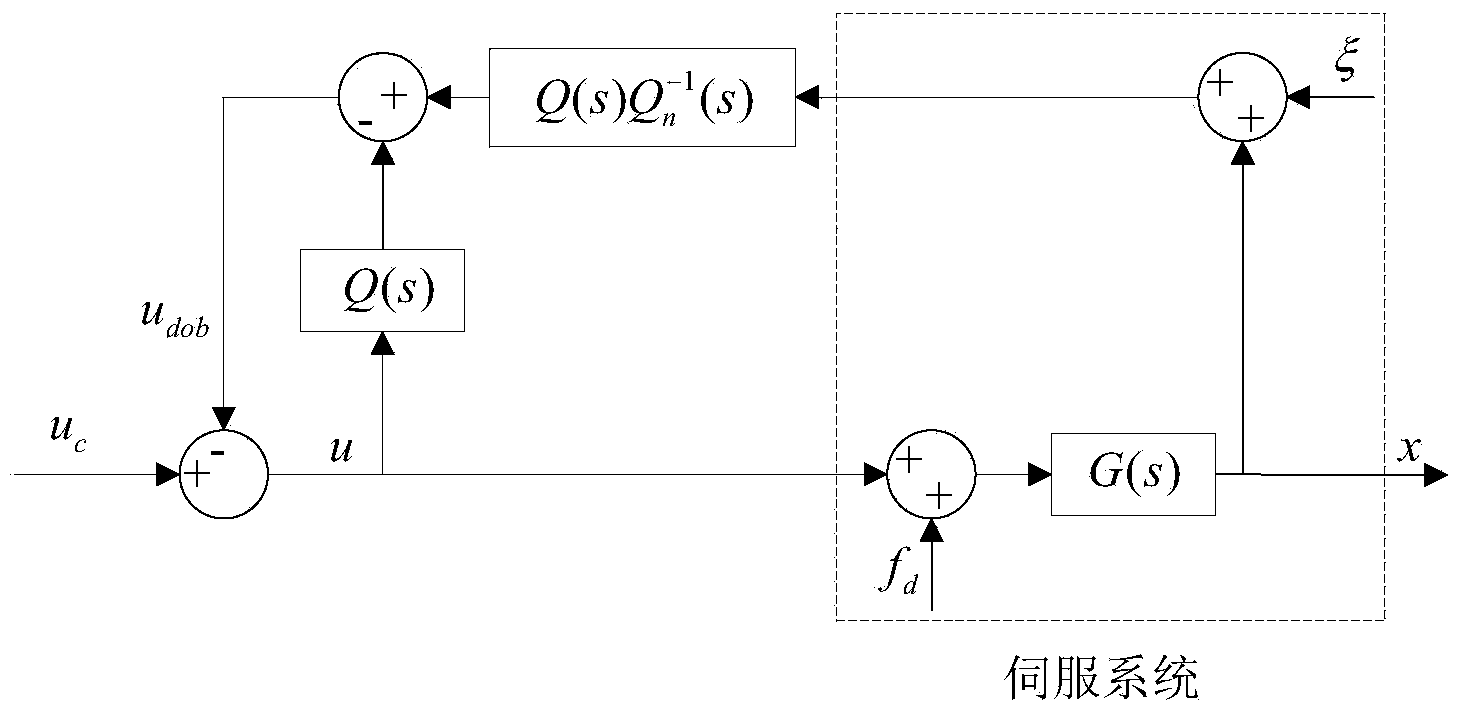
[0055] As an effective means, the disturbance observer can not only effectively solve model uncertainty, external disturbance and nonlinear problems on the basis of system closed-loop, but also dynamically compensate the system phase delay, so it is widely used in unaffected Determining the influence of factors in the control of high-performance servo systems. Such as figure 1 As shown, the basic idea of the disturbance observer is to combine the external disturbance f d and the measurement error ζ and the difference u between the actual object and the nominal model output caused by the change of model parameters dob , all equivalent to the control input u c . The control quantity u calculated by the control law c and the equivalent value u of the high-order disturbance observer dob Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com