Robust fractional order PD based on vector methods μ Controller parameter tuning method
A μ controller and parameter tuning technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problem that PD control cannot achieve satisfactory results, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0028] Include the following steps:
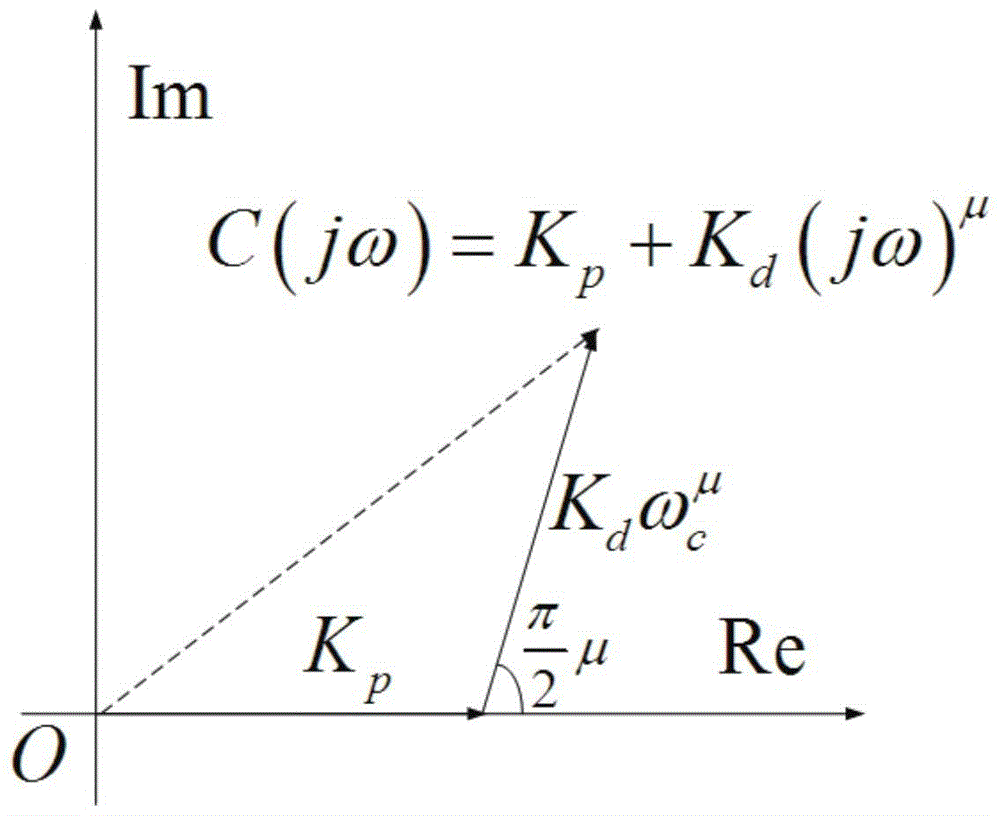
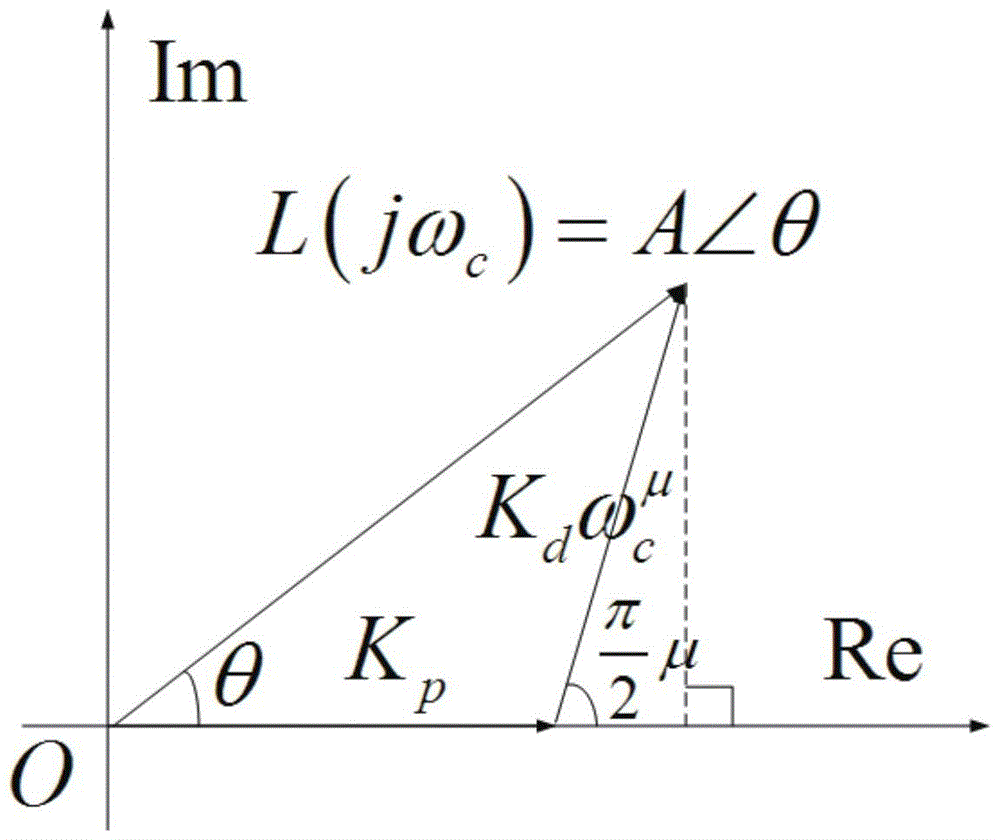
[0029] (1) Given the mathematical model transfer function of the controlled object system And given the design index bandwidth ω c and the phase margin φ required to maintain stability m , the transfer function form of the controller to be tuned is C(s)=K p +K d the s μ ; Wherein, said T is a positive real number, s is a Laplacian operator, K p Indicates the proportional coefficient to be adjusted, K d Indicates the differential coefficient to be adjusted, μ indicates the differential order to be adjusted;
[0030] (2) The charged object Written in the vector form of the controlled object:
[0031] Controlled object vector angular velocity ψ P = - T ( Tω c ) 2 + 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com