Model driven based imaging design method for embedded industrial real-time system
A real-time system, model-driven technology, applied in the direction of program control devices, etc., can solve the problems of time-consuming and labor-intensive, lack of intuition, and many modification details, so as to reduce development costs, good applicability and reusability, and good reliability. The effect of scalability and maintainability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment approach 1
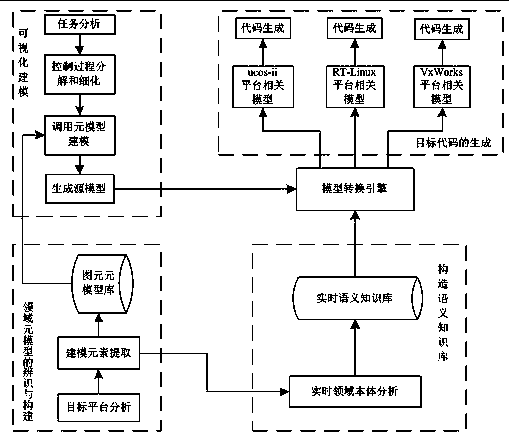
[0041] Embodiment one: a kind of embedded industrial real-time system graphical design method based on model, comprises the following steps:
[0042] (1) Identify and build a graphical meta-model in the embedded industrial real-time field: analyze mainstream embedded industrial real-time systems, summarize the characteristics and structures of key elements in the embedded real-time field, identify and build a graphical meta-model, and form a domain meta-model model library;
[0043] (2) Construct the semantic knowledge base of the graphical meta-model: according to the design requirements of the embedded industrial real-time system and the normative induction semantic constraints, construct the static and dynamic semantic knowledge base in this field;
[0044](3) Formulate a model mapping rule system based on the semantic knowledge base: take the semantic knowledge base formed in step (2) as a constraint, establish a mapping rule system from the graphic source model to the tar...
Embodiment approach 2
[0062] Implementation Mode 2: Assume that the control process of an industrial data processing system is as follows: image 3 Shown:
[0063] (a) The main task establishes two subtasks: data collection subtask and data display subtask;
[0064] (b) The data acquisition subtask waits for the data sent by the peripheral through the interrupt;
[0065] (c) The data display subtask receives the data acquired by the data acquisition subtask through the mailbox, and sends the data to the peripherals of the display screen for display.
[0066] To complete the modeling of this industrial data processing system, a total of 8 graphical meta-models are used: 1 main task, 2 common tasks, 1 interrupt, 1 mailbox, 1 message, 1 semaphore, 1 peripheral resource. And it can be seen from the analysis that the three tasks are executed in parallel. There are 20 behaviors to be used, including "create task", "wait for interrupt", etc. Using the method of the present invention, a graphical sour...
Embodiment approach 3
[0067] Implementation Mode 3: Assume that the control process of a manipulator grabbing an object at a designated location, such as Figure 5 Shown:
[0068] (a) The user issues a command to grab at (x, y, z);
[0069] (b) Waiting for the proximity signal detected by the proximity sensor;
[0070] (c) Calculate joint angles (a, b);
[0071] (d) Start the action of joint 1, the target is angle a, start the action of joint 2 at the same time, the target is angle b, and start the controller at the same time;
[0072] (e) Joint 1 moves to angle a, and joint 2 moves to angle b, while rotating the controller;
[0073] (f) Grab the target.
[0074] Based on the analysis of this figure, it can be concluded that the manipulator control task can be decomposed and refined as follows, and the object metamodel required to complete the control task in this step is in brackets:
[0075] (1) The user issues the command "grab at (x, y, z)"; (1 main task)
[0076] (2) The proximity sensor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com