Self-adaptive control method of sliding formwork of micro gyroscope based on T-S fuzzy model
A sliding-mode adaptive, micro-gyroscope technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as unaccounted for, to ensure asymptotic stability, improve robustness, compensate manufacturing effect of error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The present invention will be described in detail below with reference to the accompanying drawings and specific embodiments.
[0069] The sliding mode adaptive control method of micro gyroscope based on T-S fuzzy model includes the following steps
[0070] 1. Establish the dimensionless nonlinear motion differential equation of the micro gyroscope
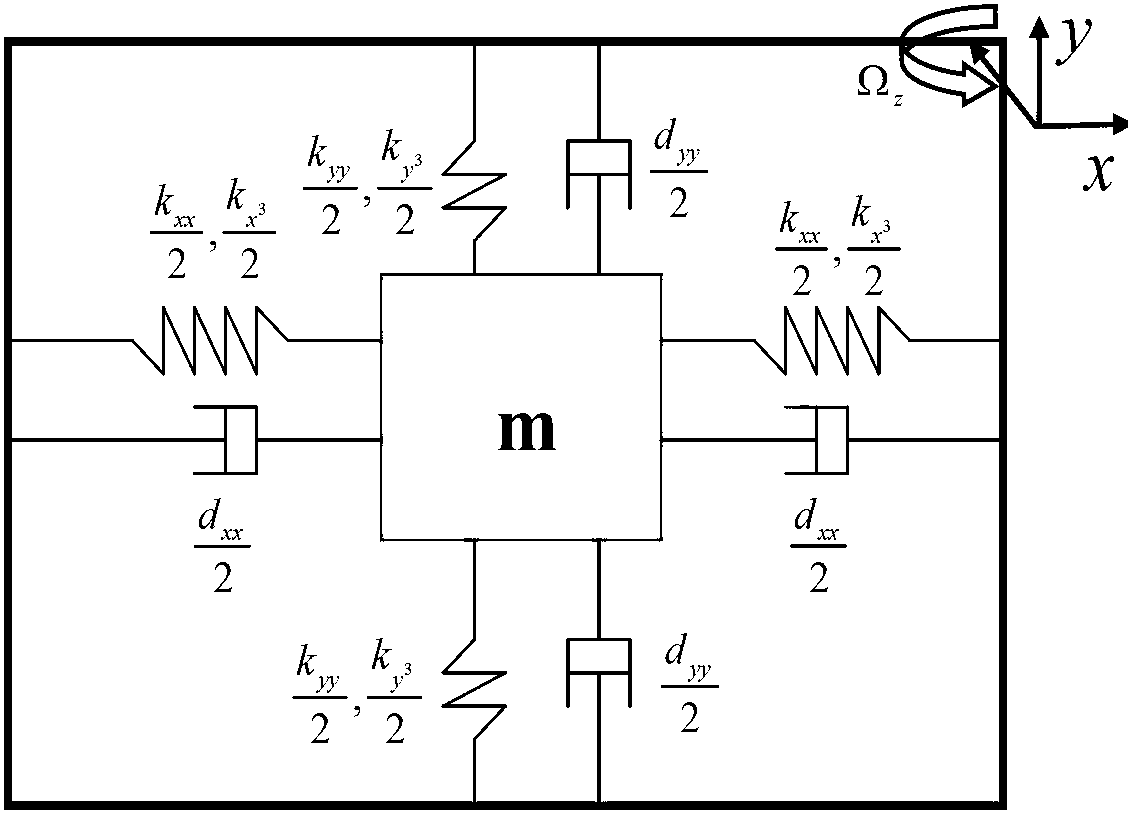
[0071] Micro-vibration gyroscopes generally include three components: a mass supported by elastic materials, an electrostatic drive device and a sensing device. The main function of the electrostatic drive circuit is to drive and maintain the constant amplitude of the micro-vibration gyroscope when it vibrates; the sensing circuit is used to sense the position and speed of the mass. The micro gyroscope can be regarded as a damped vibration system composed of a mass and a spring. figure 1 Shows the simplified micro-vibration gyroscope model in the Cartesian coordinate system, the Z-axis micro-gyro, it can be considered that the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com