Overturning and climbing robot with two telescopic arms
A robot and double-telescopic technology, applied in the direction of claw arms, manipulators, motor vehicles, etc., can solve problems such as inability to grasp and climb, lack of obstacle avoidance ability, limited adaptability of the grasped parts, etc., to increase the range of mobile operations , Improve the ability of climbing and surmounting obstacles, and improve the effect of obstacle surmounting ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
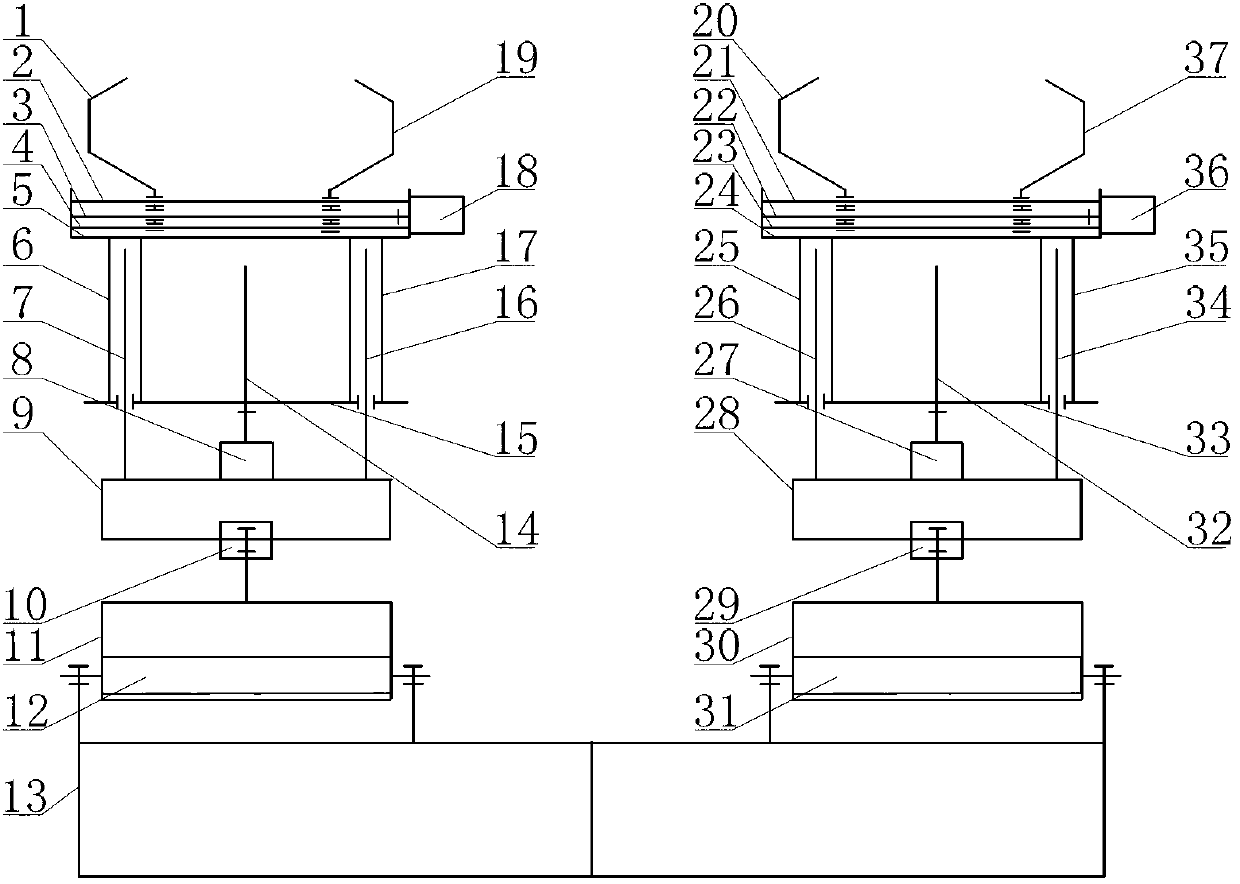
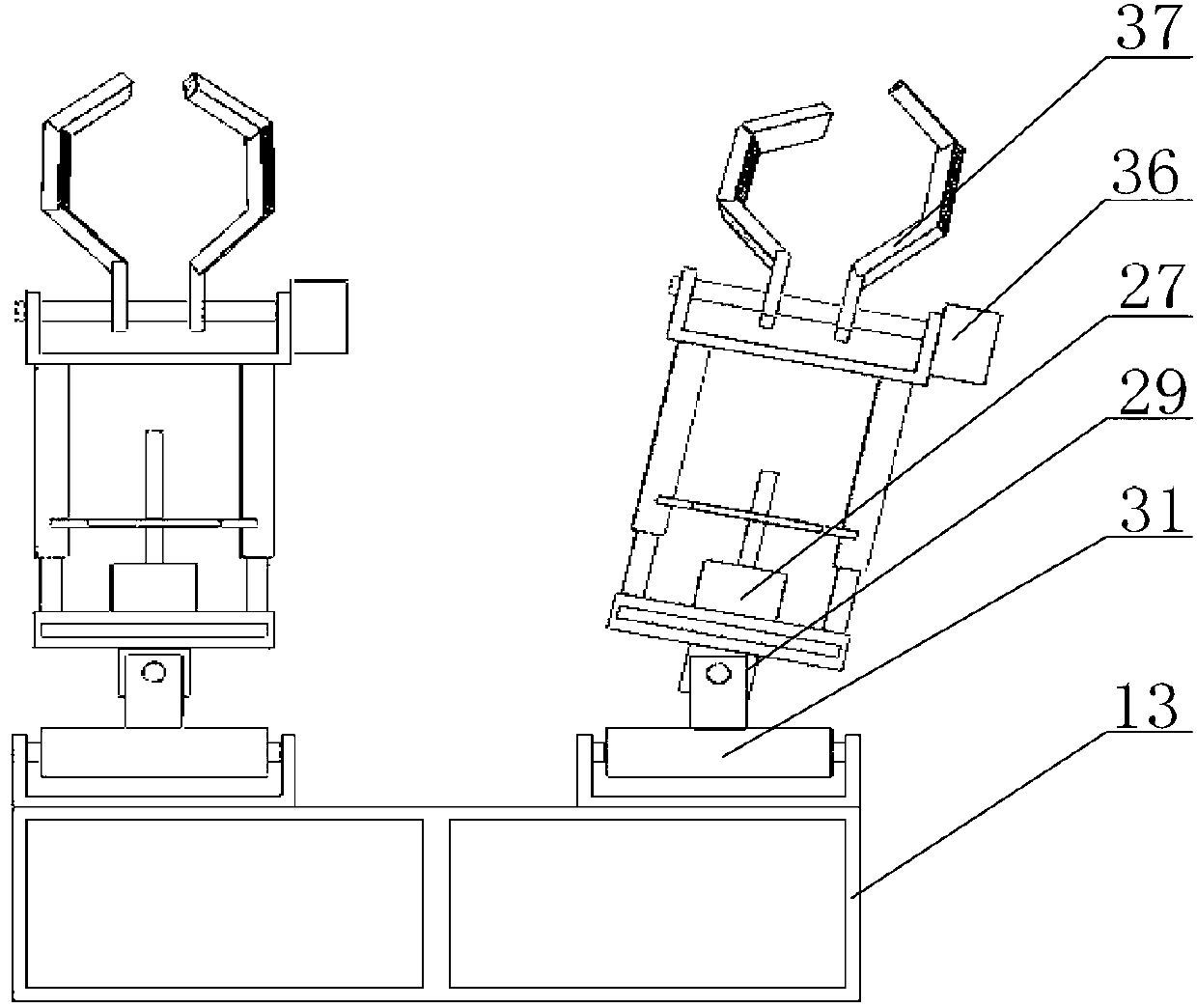
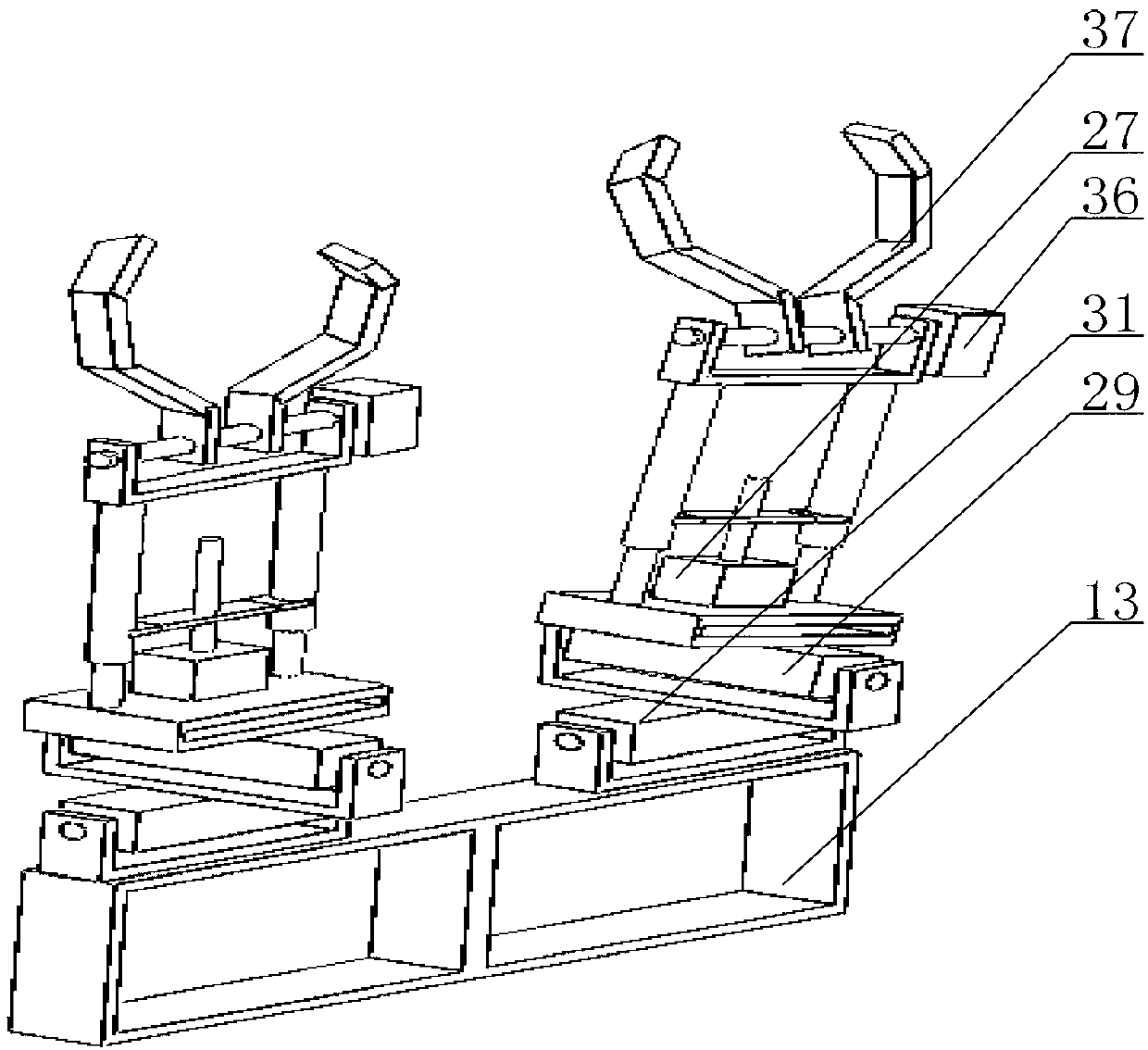
[0020] Specific embodiments of the present invention are given below and described in conjunction with the accompanying drawings.
[0021] In the attached drawings: 1. Locking gripper Ⅰ, 2. Grip guide shaft Ⅰ, 3. Grip lead screw Ⅰ, 4. Grip guide shaft Ⅱ, 5. Locking motor frame I, 6. Outer telescopic tube I , 7. Inner telescopic tube I, 8. Telescopic motor I, 9. Telescopic motor frame I, 10. Flip motor I, 11. Flip motor frame I, 12. Flip motor II, 13. Car body frame, 14. Telescopic wire Bar I, 15. telescopic tube frame I, 16. inner telescopic tube II, 17. outer telescopic tube II, 18. locking motor I, 19. locking claw II, 20. locking claw III, 21. Gripper guide shaft III, 22. Gripper screw II, 23. Gripper guide shaft IV, 24. Locking motor frame II, 25. Outer telescopic tube III, 26. Inner telescopic tube III, 27. Telescopic motor II, 28. Telescopic motor frame II, 29. Flip motor III, 30. Flip motor frame, 31. Flip motor IV, 32 Telescopic lead screw II, 33. Telescopic tube conn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com