Self-learning-based rotation control method for dangerous condition of tower crane
A tower crane and dangerous state technology is applied in the field of tower crane dangerous state slewing control based on self-learning, which can solve the problem that drivers do not find dangerous situations and dangers, and achieve the effects of smooth parking, avoiding impact and avoiding wrong behavior.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
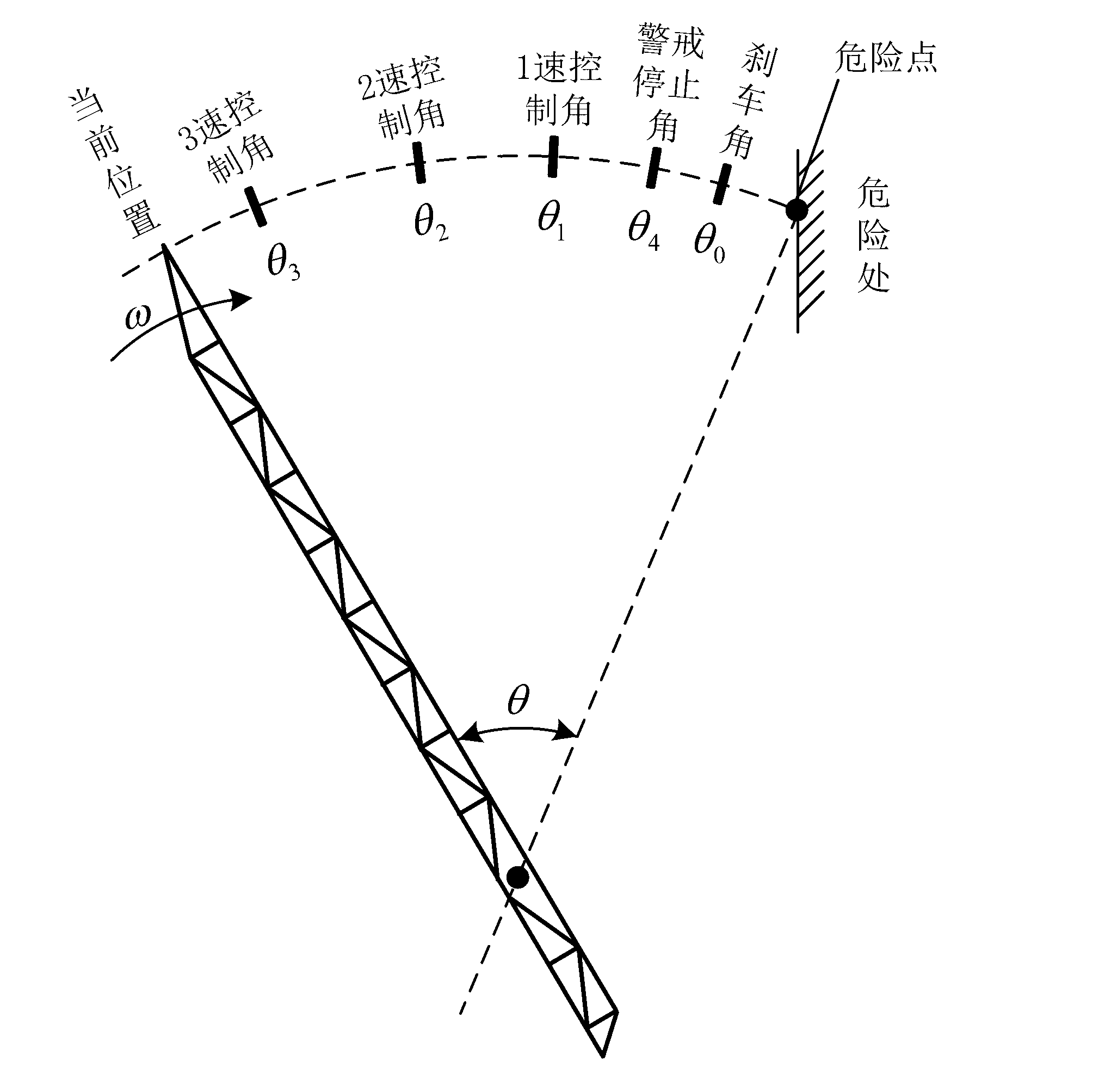
[0045] Taking a certain type of 16-ton tower crane as an example, the jib is 50 meters long. Through self-learning, the parameters of the tower crane's three speed control angles and braking angles are:
[0046] θ 3 is 45°; θ 2 is 25°; θ 1 is 15°; θ 4 is 10°; θ 0 is 5°; the braking time is 2 seconds.
[0047] Utilizing the above-mentioned slewing control method of the present invention, the slewing control of the tower crane stops smoothly, the parking position is relatively accurate, the working range of the tower crane is effectively utilized, and safe work is ensured.
[0048] To sum up, the tower crane anti-collision rotation control method of the present invention adopts a passive control method, which improves the reliability of the tower crane control; at the same time, the present invention adopts segmental and step-by-step deceleration and braking to realize deceleration first and then stop, reducing impact , to ensure the stability of the slewing parking.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com