Location control method of 2R underactuated planar mechanical arm based on subdivision control
A segmented control and control method technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as difficult to master and difficult to control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
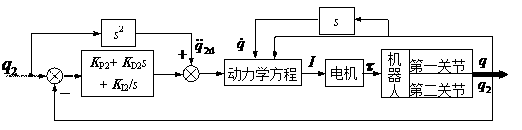
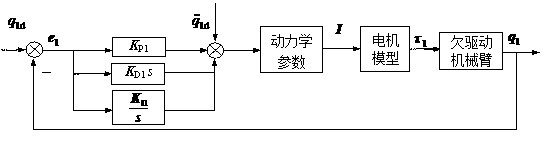
[0059] The specific structure reference of the 2R under-actuated planar mechanical arm provided by the present invention Image 6 (1-motor; 2-first joint; 3-first rod; 4-second rod; 5-second joint; 6-encoder), the specific steps for position control are as follows, the control flow Reference Figure 7 .
[0060] (1) Establishment of dynamic model
[0061] For the passive 2R underactuated manipulator with the second joint, when considering the friction of each joint, the system dynamics model is
[0062] D 11 · q . . 1 + D 12 · q . . 2 + C 11 · q . 1 · q . 2 + C 12 · q . 2 2 + B 1 · q . 1 + sgn ( q . 1 ) · B 1 j = τ 1 D twenty one · q . . 1 + D twenty two · q . . 2 + C twenty one · q . 1 2 + B 2 · q . 2 + sgn ( q . 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com