Kinesthesis teaching control method based on vision sense for remote control of robot
A control method and robot technology, applied in non-electric variable control, position/direction control, control/regulation system and other directions, can solve problems such as loss, achieve the effect of small amount of data, avoid blindness of robot manipulation, and relieve psychological tension
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
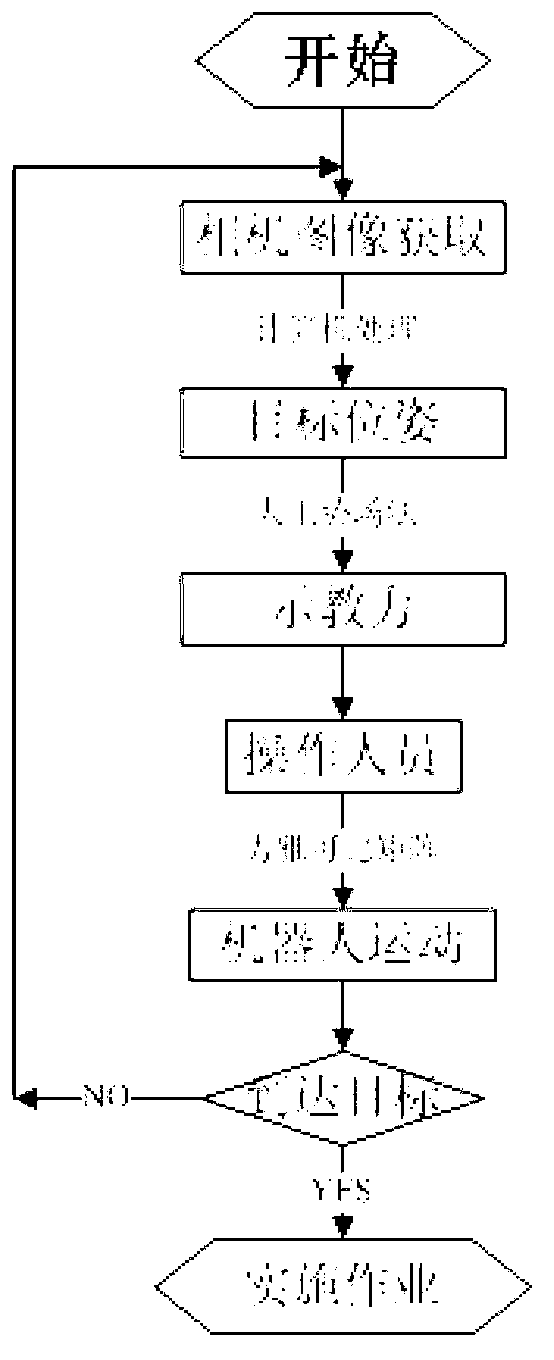
[0037] The present invention will be described in further detail below in conjunction with embodiment and accompanying drawing, but the embodiment of the present invention is not limited to this embodiment, figure 1 A flow chart of the system is given.
[0038] According to the vision-based kinesthetic teaching control method of the telemanipulation robot, the present invention comprises the following steps:
[0039] S1. Using stereo vision technology to identify and extract spatial information of on-site operation objects and background environment (obstacles);
[0040] S2. Using the pose relationship between the work object and the end of the robot obtained in step S1 as a parameter, construct the virtual attractive force of the work object to the robot;
[0041] S3, taking the distance between the end of the robot and the background environment (obstacle) along its velocity direction obtained in step S1 as a parameter, constructing the obstacle repulsion force suffered by ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com