PSD (Position Sensitive Detector)-based industrial robot self-calibration method and device
An industrial robot and robot technology, applied in the direction of measuring devices, optical devices, instruments, etc., can solve the problem that it is difficult to obtain high measurement accuracy in terms of field of view and resolution, cannot perform self-calibration of robot space pose, and data acquisition is time-consuming and laborious, etc. problem, to achieve the effect of high measurement accuracy, simple installation and operation, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
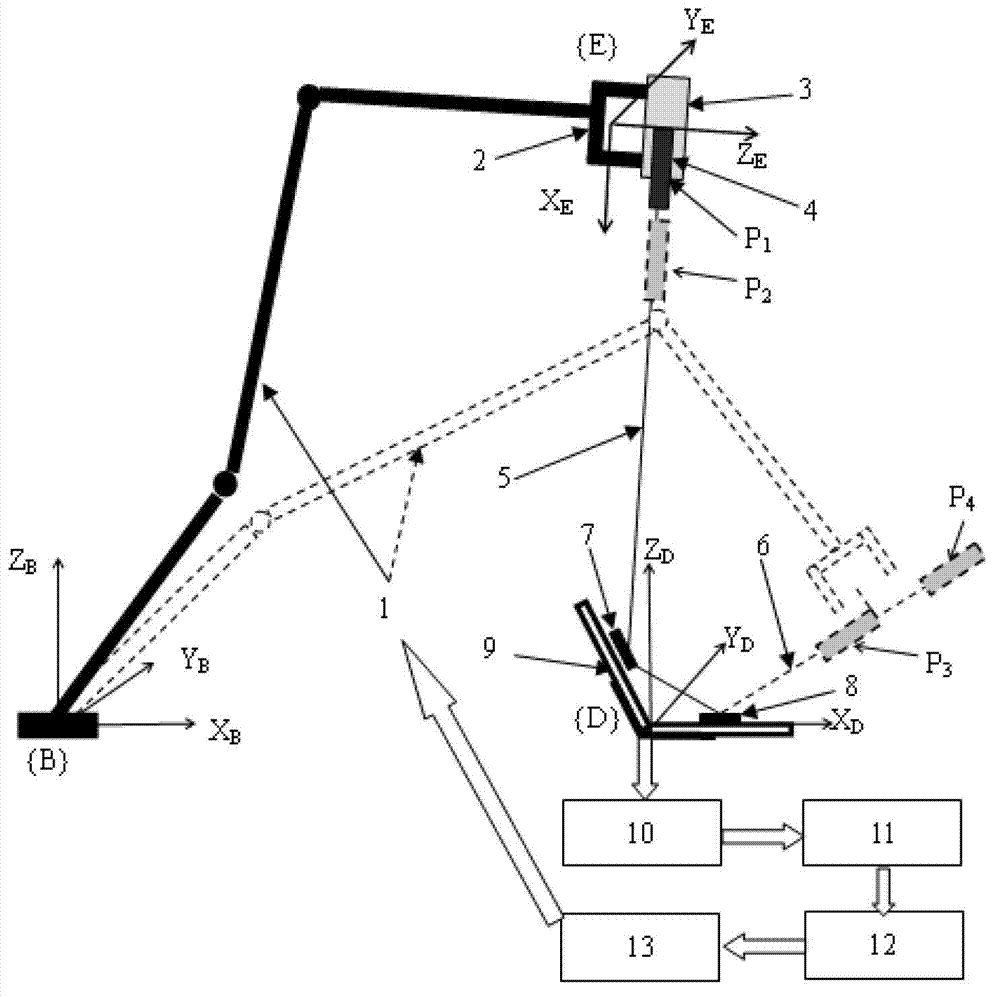
[0046] Such as figure 1 Shown is the structural representation of the self-calibration device for an industrial robot based on PSD of the present invention, which includes: a robot 1; a laser 4 installed at the end 2 of the robot; a V-shaped clamp 9 arranged in the accessible workspace of the robot 1; respectively Two position-sensitive device PSDs installed on the two plates of the V-shaped fixture 9, i.e. the first PSD7 and the second PSD8, wherein, when the robot is in different positions, the laser beam emitted by the laser is projected on the first PSD or the second PSD on, so as to form the projection spot and the reflection beam, and the reflection beam is projected onto the second PSD or the first PSD to form the reflection spot; the robot closed-loop control unit connected with the first PSD7 and the second PSD8 respectively, which will project the spot and reflection The light spots are respectively positioned at the center point positions of the first PSD7 or the se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com