Manufacturing method of radial fuzzy neural network generalized inverse controller of bearingless asynchronous motor
A technology of fuzzy neural network and asynchronous motor, which is applied in the direction of motor generator control, AC motor control, electronic commutation motor control, etc. It can solve the choice dependence of type and structure, open-loop instability of pseudo-linear system, application difficulties, etc. problems, to achieve the effect of improving learning ability, overcoming local minimum points, and strong fuzzy reasoning ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
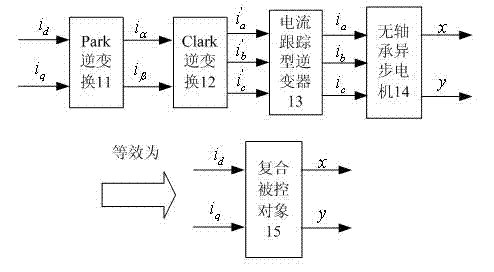
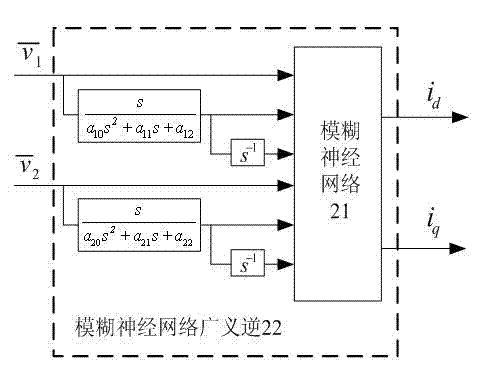
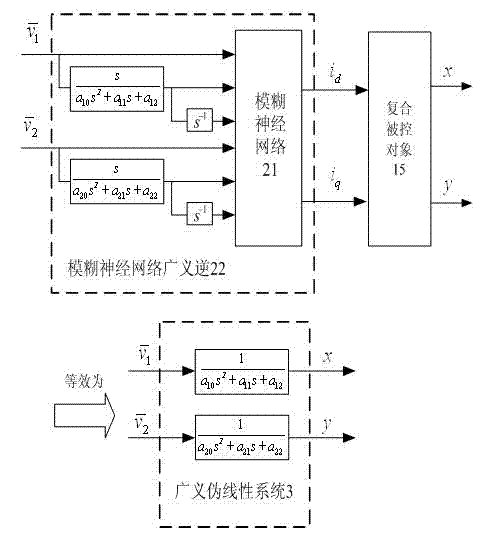
[0018] The embodiment of the present invention is as follows: first, the complex controlled object is composed of Park inverse transform, Clark inverse transform, current tracking inverter, and the radial position of the controlled bearingless asynchronous motor, and the compound controlled object is equivalent to two A 4th-order differential equation model in a phase-rotating coordinate system, the relative order of the system vectors is {2,2}. A fuzzy neural network (5-layer network) with 6 input nodes and 2 output nodes and 4 linear links are used to form the generalized inverse of fuzzy neural network of a compound controlled object with 2 input nodes and 2 output nodes. And by adjusting each parameter and weight of the fuzzy neural network, the generalized inverse of the fuzzy neural network realizes the function of the generalized inverse system of the compound controlled object. Then the generalized inverse of the fuzzy neural network is placed before the compound contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com