Parallel experimental device for six-degree-of-freedom gait simulation
An experimental device and degree-of-freedom technology, applied in the field of mechanical devices, can solve the problems of inability to form a dual relationship, few degrees of freedom, inconsistency between active and passive relationships, and achieve the effect of simple and compact structure and high rigidity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
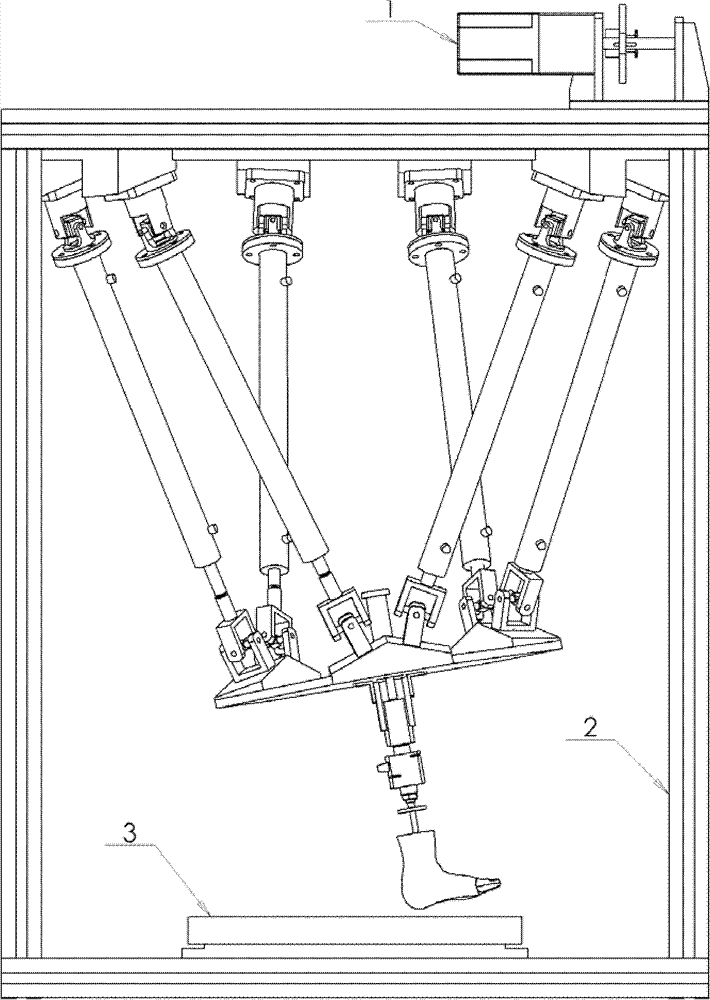
[0033] like figure 1 As shown, the parallel 6-DOF gait simulation experimental device includes a frame structure 1, figure 2 The six-bar parallel mechanism and Figure 8 tandem loading mechanism. Among them, the frame 1 is fixed on the ground, the tendon drive motor 2 is installed on the top of the frame, the six-bar parallel mechanism is suspended on the upper part of the frame, and the lower part of the frame is installed with a height-adjustable force measuring plate 3 . The six-bar parallel mechanism is fixed to the frame 1 through its fixed platform 4, and the series loading mechanism is installed on the moving platform 6 of the six-bar parallel mechanism.
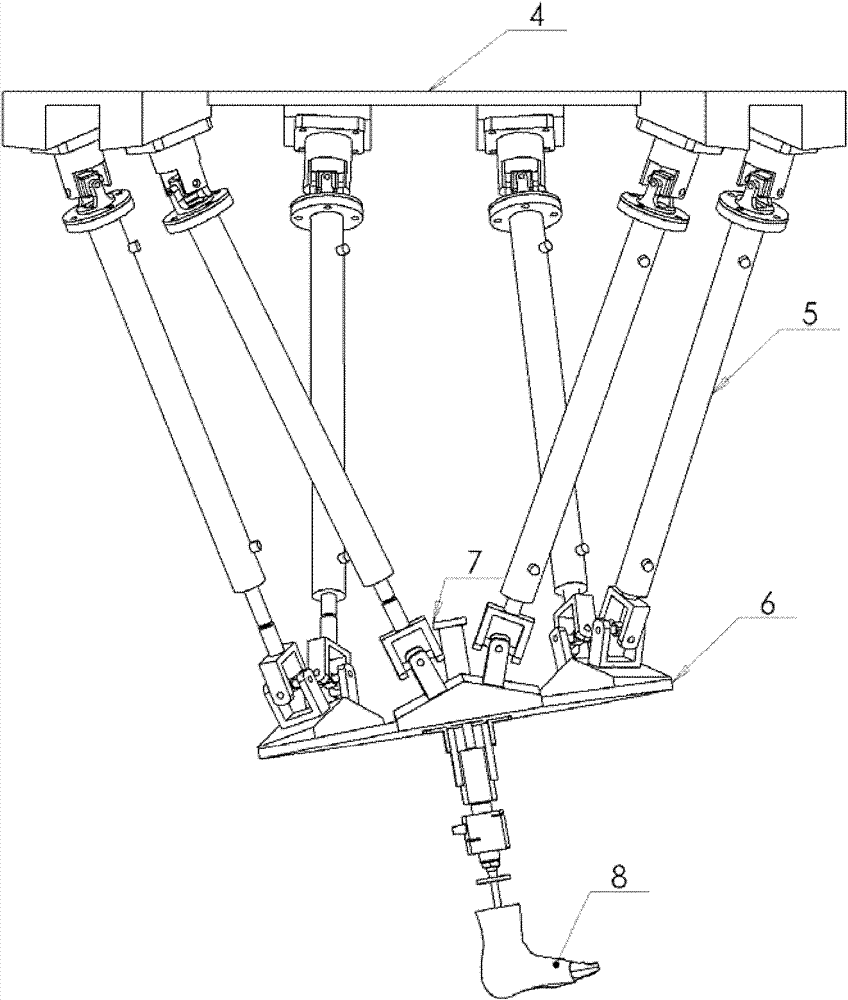
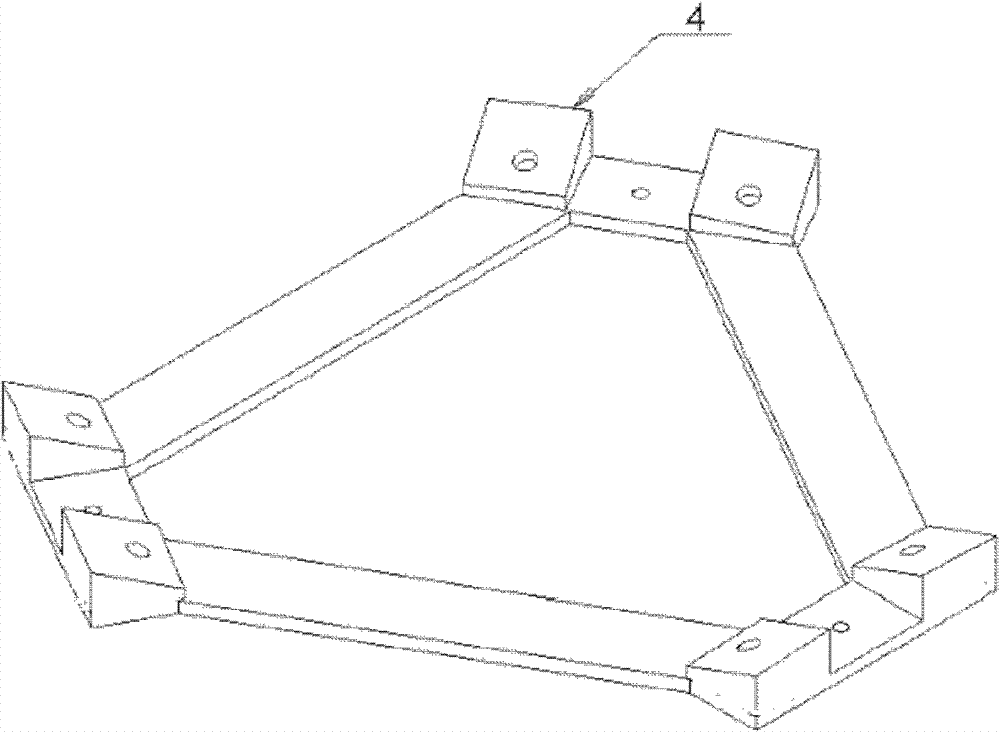
[0034] like figure 2 As shown, the six-bar parallel mechanism adopts a typical Stewart parallel structure, which is composed of a fixed platform 4, 6 top U-shaped fixed seats 16, 6 identical moving branches 5, 6 bottom U-shaped seats and a movable platform 6. UPU parallel mechanism, its moving platform can reali...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com